

Method for detecting and recognizing various types of obstacles based on convolution neural network
A convolutional neural network and obstacle detection technology, applied in the field of multi-type obstacle detection and recognition based on convolutional neural network, can solve the problems of low detection and recognition accuracy, target tracking, and unlabeled target object attributes, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
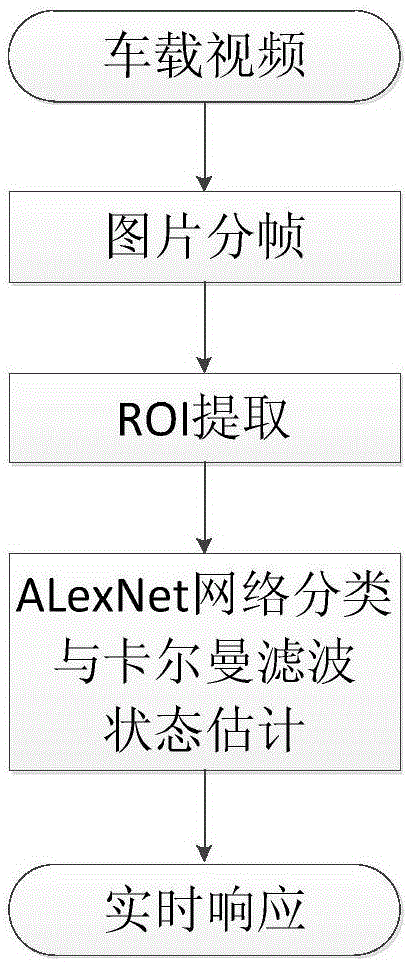
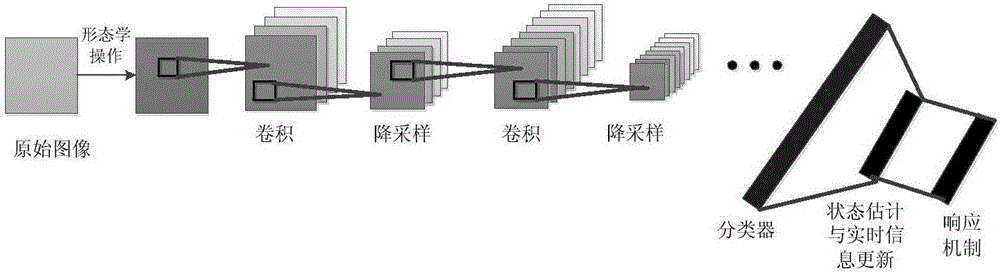
[0078] The method of multi-type obstacle detection and recognition based on convolutional neural network, the specific implementation of backpropagation is as follows:
[0079] δ l =(W l+1 ) T δ l+1 of'(u l )
[0080] where "o" means multiply each element.
[0081] Multi-type obstacle detection and recognition method based on convolutional neural network, including convolutional neural network training stage and three-dimensional information labeling layer. The residual of the output layer of the convolutional neural network training phase is calculated as follows:
[0082]
[0083] Among them, y represents the desired output, h w,b (x) represents the actual output constrained by w,b, As the constraint function, it can be the activation function sigmoid, tanh, etc.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More