

Dual servo motor driven variable degree-of-freedom multi-linkage mechanism for gas cutting blanking machine
A dual-servo motor, degree-of-freedom technology, applied in the field of machinery, can solve the problems such as the variable degree-of-freedom mechanism of the gas cutting blanking machine, the decline of the dynamic performance of the manipulator, and the large cumulative error of the manipulator, so as to achieve a compact structure, improve stability and reliability. High performance and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
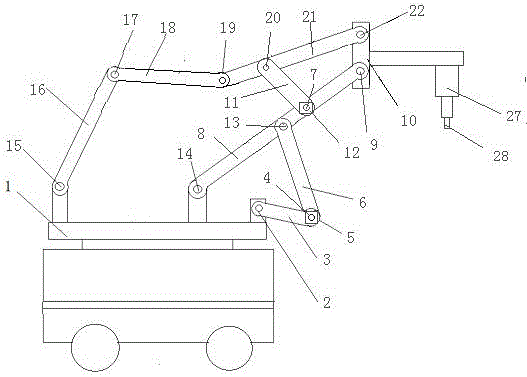
[0007] A dual-servo motor-driven variable-degree-of-freedom multi-link mechanism for a gas cutting cutting machine, including a base 1, a boom lifting mechanism, a gripper link pitching mechanism, a gripper 27, a torch 28, and a servo drive device, the first locking device 5 and the second locking device 12; the base 1 is installed on a movable slewing platform; the boom lifting mechanism includes a boom 8, a fourth connecting rod 3 and a fifth connecting rod 6 , one end of the boom 8 is connected to the base 1 through the sixth rotating pair 14, and the other end is connected to the gripper connecting rod 10 through the ninth rotating pair 9; one end of the fourth connecting rod 3 is connected to the tenth rotating pair 2 The base 1 is connected, the other end is connected to one end of the fifth connecting rod 6 through the eleventh rotating pair 4, and the other end of the fifth connecting rod 6 is connected to the boom 8 through the seventh rotating pair 13; the gripper con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More