

Motion state discrimination method and system based on power-assisted exoskeleton robot
An exoskeleton robot, motion state technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex algorithm, large amount of calculation, poor real-time performance, etc., and achieve the effect of simplified algorithm, good real-time performance and easy implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
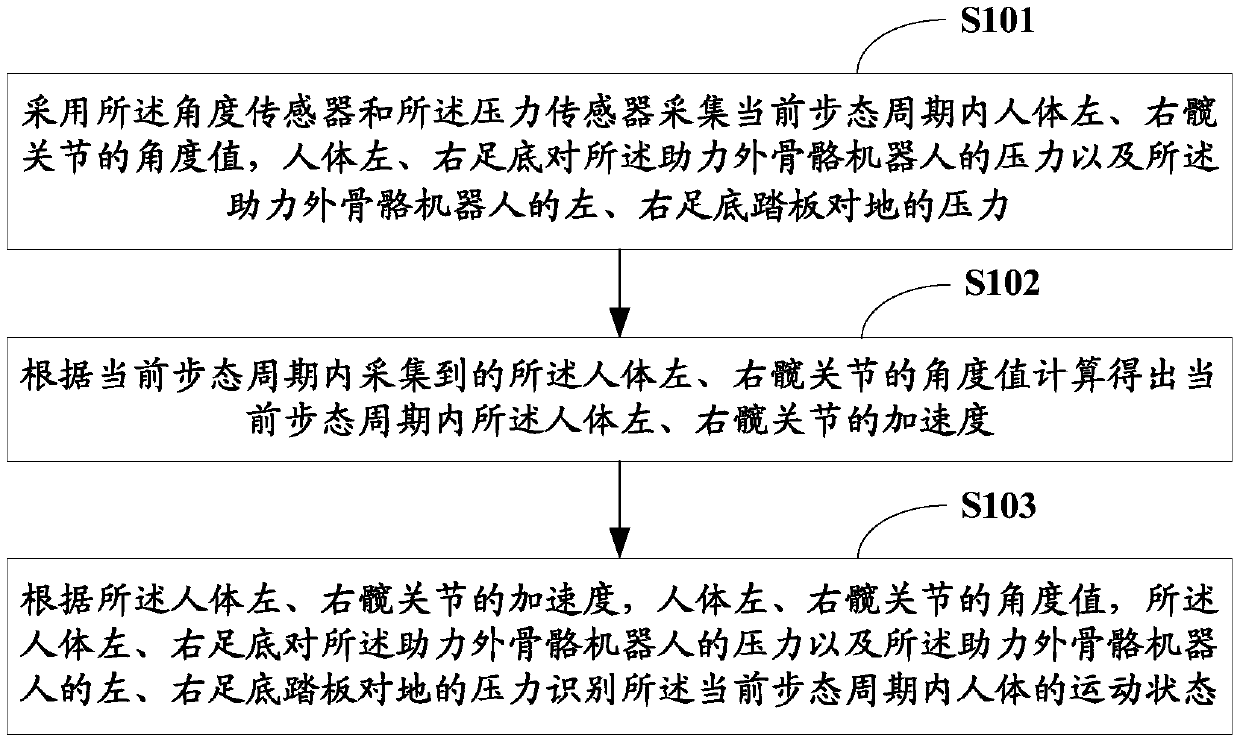
[0020] figure 1 It is a schematic flowchart of a motion state discrimination method based on an assisting exoskeleton robot provided by an embodiment of the present invention. Wherein, the hip joint of the power-assisted exoskeleton robot is equipped with an angle sensor, and the upper and lower sides of the foot pedal of the power-assisted exoskeleton robot are equipped with pressure sensors. see figure 1 As shown, the method may include the following steps:
[0021] In S101, use the angle sensor and the pressure sensor to collect the angle values φ of the left and right hip joints of the hum...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More