

Method and device for controlling redundant mechanical arm
A control method and control device technology, applied in the field of robotics, can solve the problems of complex calculation and cumbersome steps of multi-objective solution methods, and achieve the effects of avoiding the problem of dimension explosion, improving reaction speed, and simplifying the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
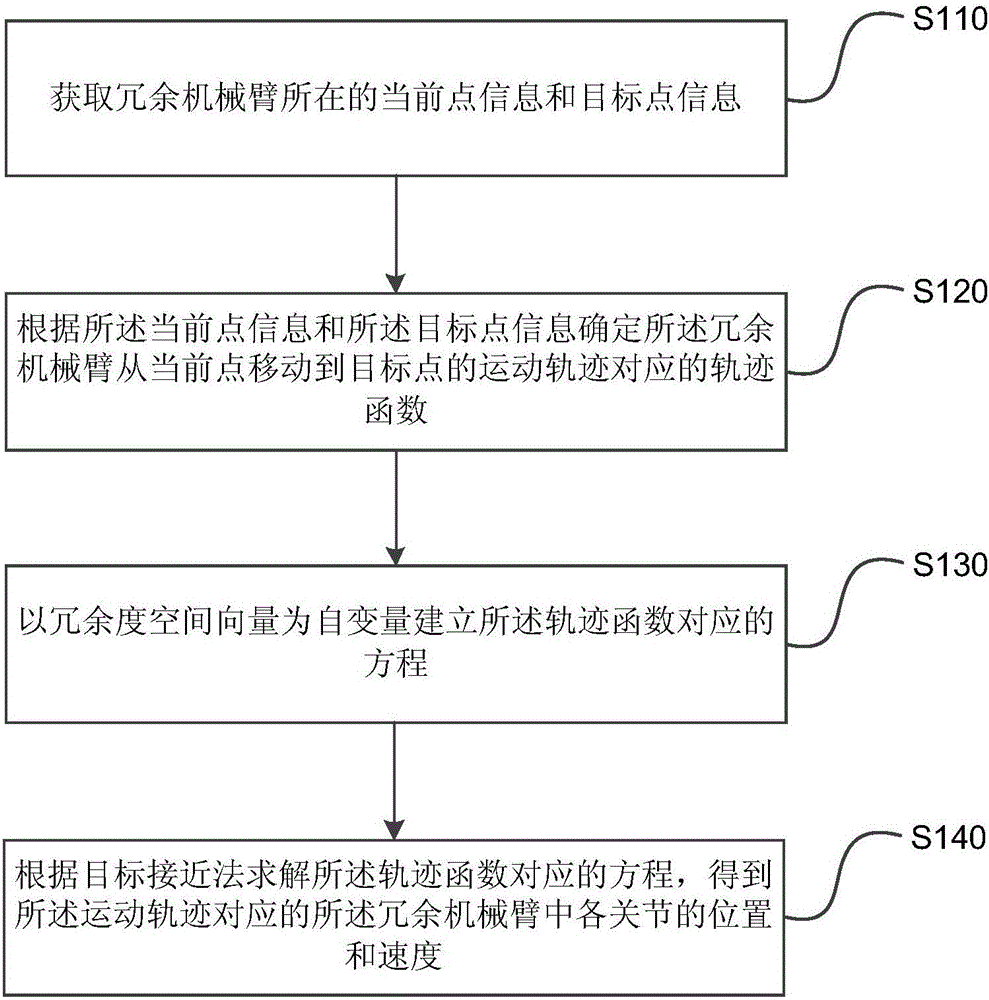
[0022] Embodiment 1 of the present invention provides a method for controlling a redundant robot arm. The method can be executed by a control device of a redundant robot arm, wherein the device can be implemented by hardware and / or software, and generally can be integrated in a control module for controlling a robot. figure 1 It is a schematic flow chart of the control method of the redundant robotic arm provided in Embodiment 1 of the present invention, as shown in figure 1 As shown, the method includes:
[0023] S110. Obtain current point information and target point information where the redundant robotic arm is located.
[0024] In this embodiment, the current point information and target point information of the redundant robotic arm may be the current point information and target point information at the end of the redundant robotic arm, or the current point information and target point information of each joint of the redundant robotic arm , there is no limit here. C...
Embodiment 2
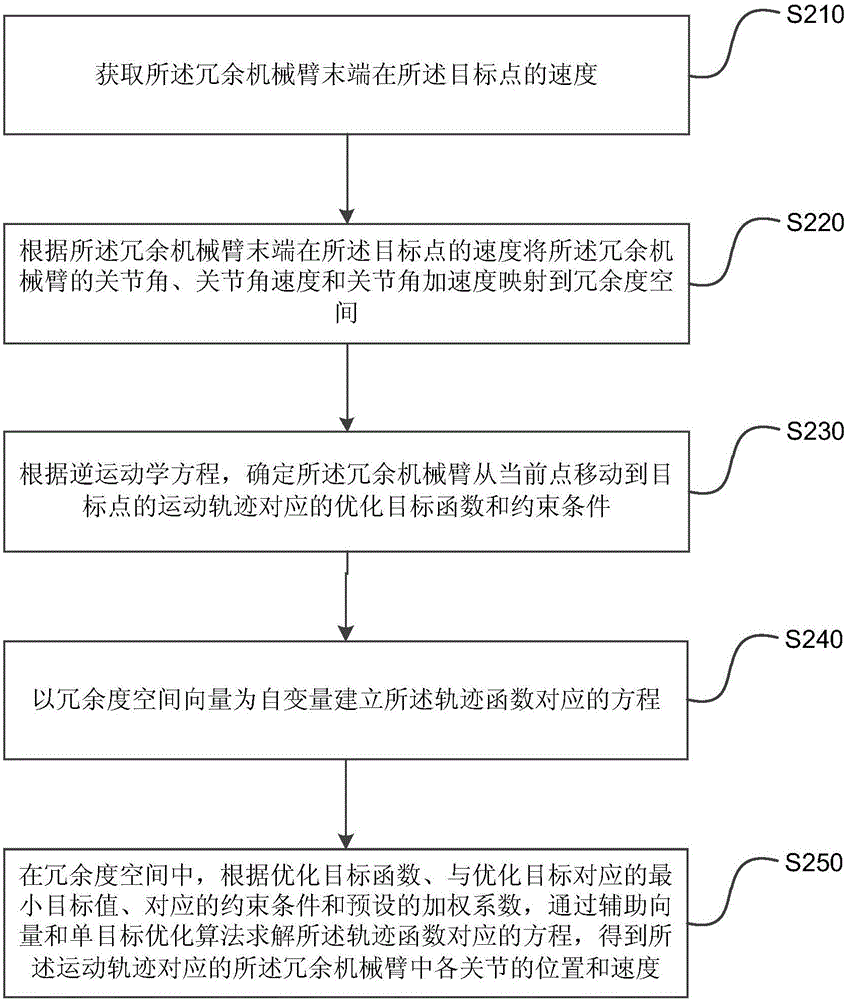
[0035] figure 2 It is a schematic flowchart of a method for controlling a redundant robotic arm provided in Embodiment 2 of the present invention. This embodiment is optimized on the basis of the above embodiments. Further, the acquiring the information of the current point where the redundant robotic arm is located and the target point information includes: acquiring the speed of the end of the redundant robotic arm at the target point; The joint angles, joint angular velocities and joint angular accelerations of the redundant manipulator are mapped to the redundancy space according to the velocity of the end of the redundant manipulator at the target current point.
[0036] Further, the determining the trajectory function corresponding to the movement trajectory of the redundant manipulator from the current point to the target point according to the current point information and the target point information includes: determining the redundant mechanical arm according to the...
Embodiment 3
[0180] Embodiment 3 of the present invention provides a control device for a redundant robotic arm. The device can be implemented by hardware and / or software, and is generally integrated in a control module for controlling the robot, and can realize the control of the redundant robotic arm by executing the control method of the redundant robotic arm. Figure 4 Shown is a structural block diagram of the control device of the redundant robotic arm provided in this embodiment, as Figure 4 As shown, the device includes:
[0181] An information acquisition unit 410, configured to acquire current point information and target point information where the redundant robotic arm is located;
[0182] A trajectory unit 420, connected to the information acquisition unit, configured to determine a trajectory function corresponding to the movement trajectory of the redundant mechanical arm from the current point to the target point according to the current point information and the target p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More