Humanoid type mechanical finger with perceptive functions of temperature and touch force
A technology of mechanical fingers and sensing function, applied in the field of manipulators, which can solve the problems of single feedback information, inability to comprehensively provide environmental parameters of manipulators, and tight integration of manipulators.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
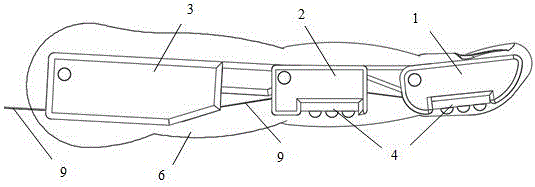
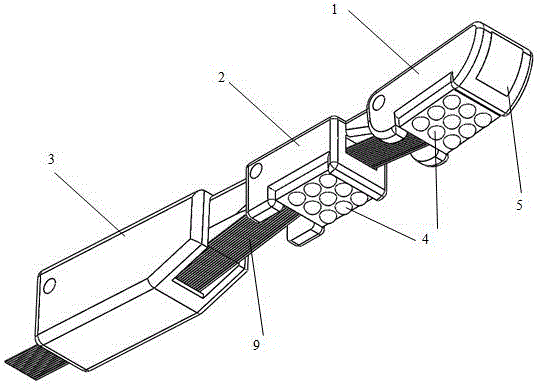
[0022] Such as figure 1 , image 3 As shown, the humanoid mechanical finger of the present invention is divided into three finger metal phalanges with controllable bending amplitude and are hinged sequentially, and the outer surface is encapsulated with skin-colored silicone 6; and small circuits, the pulps of the metal phalanx 1 of the first finger and the metal phalanx 2 of the second finger are provided with plane grooves, and three-dimensional force sensors 4 are respectively installed in the plane grooves, and the top of the metal phalanx 1 of the first finger is semicircular There is a gap on the surface, and the arc-shaped thermal conductor and the temperature sensor 5 are fixed by buckles, and the temperature sensor 5 is closely attached to the inner surface of the thermal conductor; the temperature sensor 5 can flexibly measure the temperature...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More