

Manipulator capable of rotating in multiple directions
A manipulator and one technology, applied in the field of manipulators, can solve the problems of complex manipulator structure, inability to realize multi-directional rotation, inconvenient manipulator maintenance and installation, etc., to achieve the effect of simple structure and rapid loading and unloading of circular workpieces.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
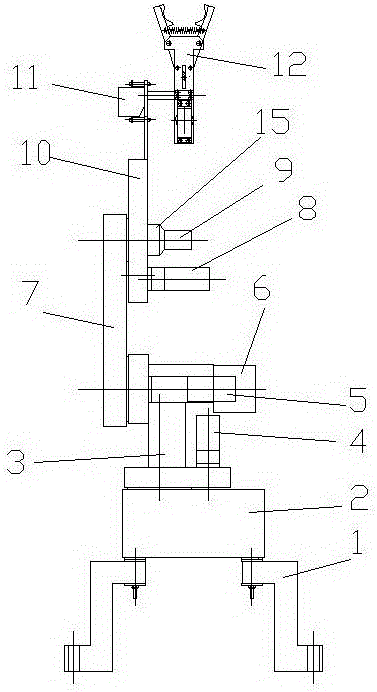
[0023] Example: see Figures 1 to 4 As shown, a manipulator that can rotate in multiple directions includes a first motor 4, a first reducer 3, a second motor 5 and a second reducer 6;
[0024] The junction box 2 is fixed on the base 1, the first reducer 3 is fixed on the junction box 2, the rotating shaft of the first motor 4 is fixed with the input shaft of the first reducer 3, and the output shaft of the first reducer 3 is fixed There is a second speed reducer 6, and the rotating shaft of the second motor 5 is fixed with the input shaft of the second speed reducer 6;
[0025] A boom 7 is fixed on the output shaft of the second speed reducer 6, and a hinge shaft 9 is formed or fixed on the boom 7. The small arm 10 is a hollow box, and the small arm 10 is inserted and sleeved on the hinge shaft 9. The third motor 8 is fixed on the small arm 10, a drive gear 13 is fixed on the rotating shaft of the third motor 8, a fixed gear 14 is fixed on the hinge shaft 9, the drive gear 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More