

Route planning algorithm of intelligent lawn mower
A path planning and lawn mower technology, applied in the field of intelligent robots, can solve the problem of unclear position coordinates in the working area, and achieve the effect of facilitating later autonomous navigation control, reducing complexity, and realizing later autonomous navigation control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
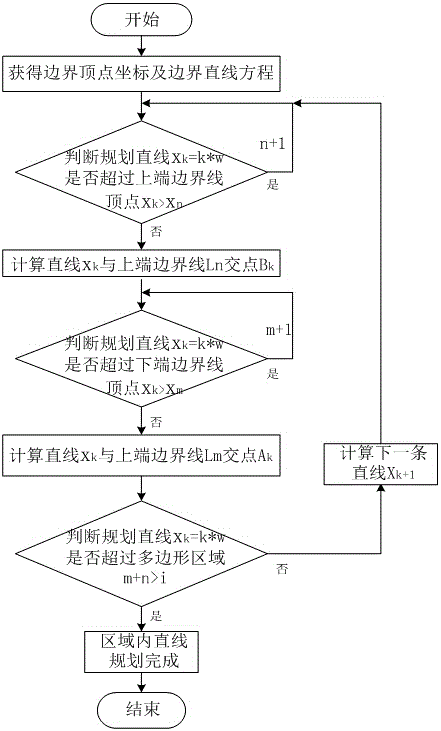
[0030] A path planning algorithm for an intelligent mowing vehicle, the specific steps are as follows:
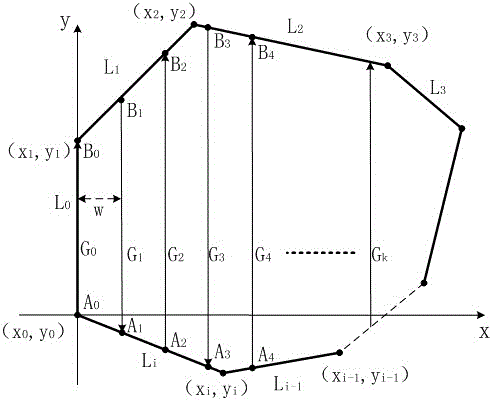
[0031] 1) In the working area set by the intelligent lawn mower, the working grass field is divided into several small polygonal working areas from A to Z according to terrain, working conditions and other factors;
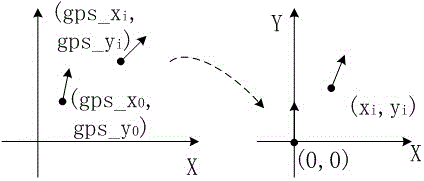
[0032] 2) Control the intelligent lawnmower to run along the boundary of each polygonal working area, and collect the geodetic position coordinates of the boundary vertices of the multiple small polygonal working areas divided in step 1) through the vehicle-mounted GPS device as ;
[0033] 3) Transform the geodetic position coordinate information collected in step 2) into the local coordinate system. The schematic diagram of co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More