

Laser-navigation-based omnibearing motion mechanism control system
A control system, laser navigation technology, applied in control/adjustment systems, non-electric variable control, two-dimensional position/channel control and other directions, can solve problems such as inability to adapt to narrow environments, achieve flexible obstacle avoidance, and improve motion accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
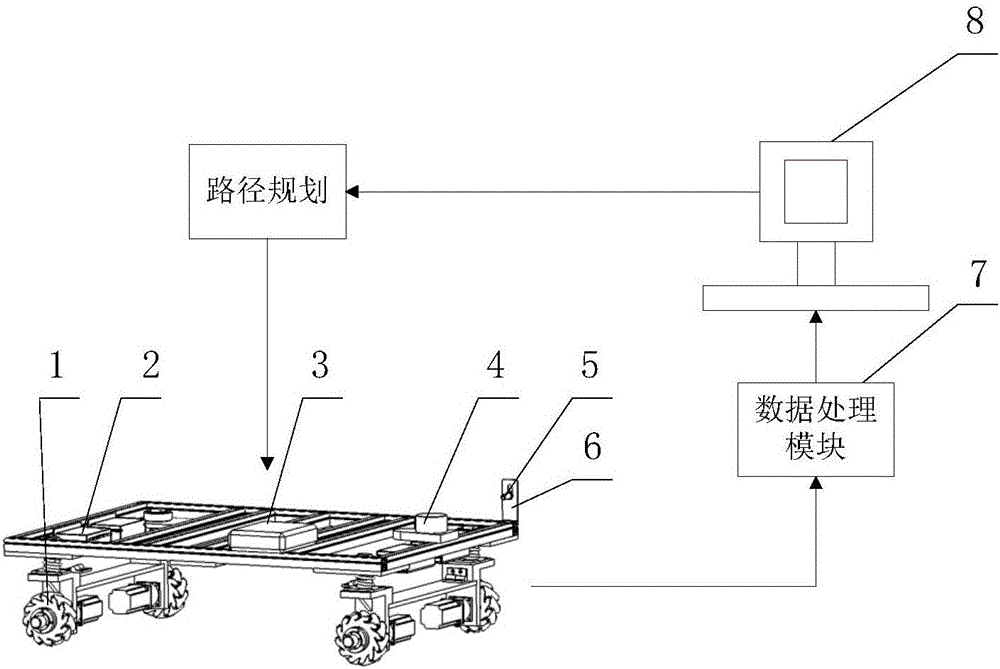
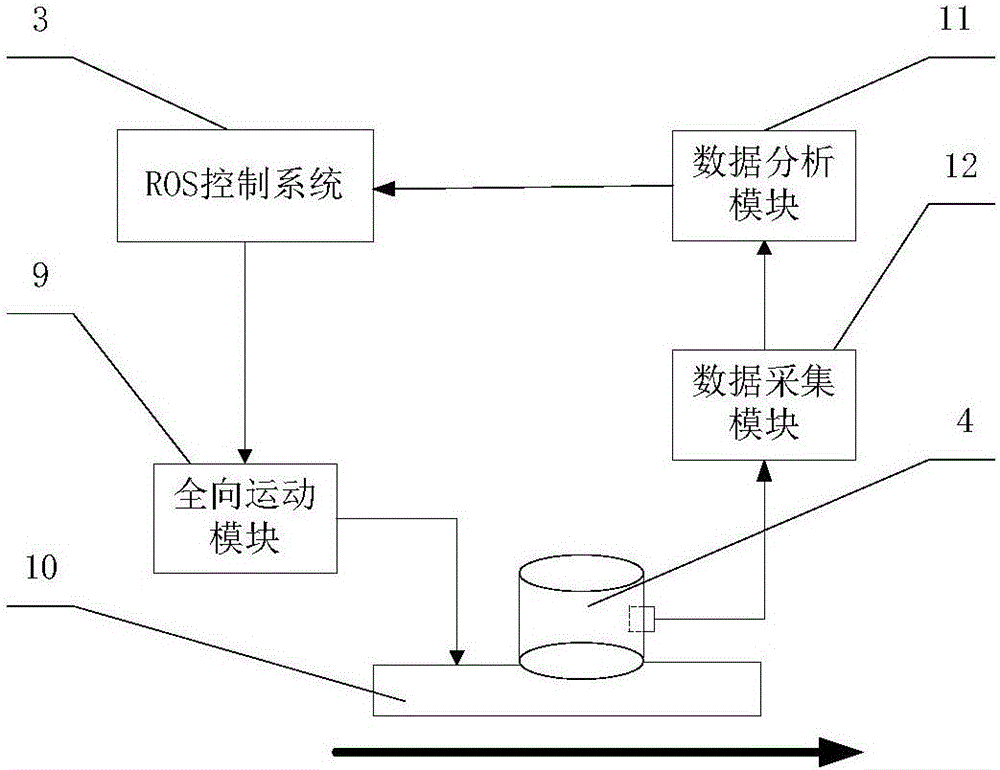
[0023] refer to Figure 1 to Figure 3 , an omnidirectional motion control system based on laser navigation, including an omnidirectional movement module based on ROS four-axis control system 3 and a navigation module based on RPLIDAR lidar 4; among them,
[0024] The ROS four-axis control system 3 feeds back position information in real time through the RPLIDAR lidar 4, controls the rotation speed and steering of the detection robot 10 through the driver 2, and realizes the lateral movement, oblique movement and in-situ rotation around its own axis of the detection robot 10. , to ensure that the detection robot walks along the predetermined path;
[0025] The RPLIDAR laser radar 4 can carry out the 360° omnidirectional scanning and ranging task of the set radius range and is connected to the PC 8 through a supporting USB cable, and the PC 8 realizes the detection by the RPLIDAR laser radar 4 Map construction and path planning of the robot 10, and store the planned path inform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More