

Cooperative robot obstacle avoidance system based on multiple sensors and control method thereof
A robot and multi-sensing technology, applied in the field of robotics, can solve the problems of complex working environment, damage to external objects of the robot, and insufficient operator skills, so as to achieve the effect of safe operation and obstacle detection.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
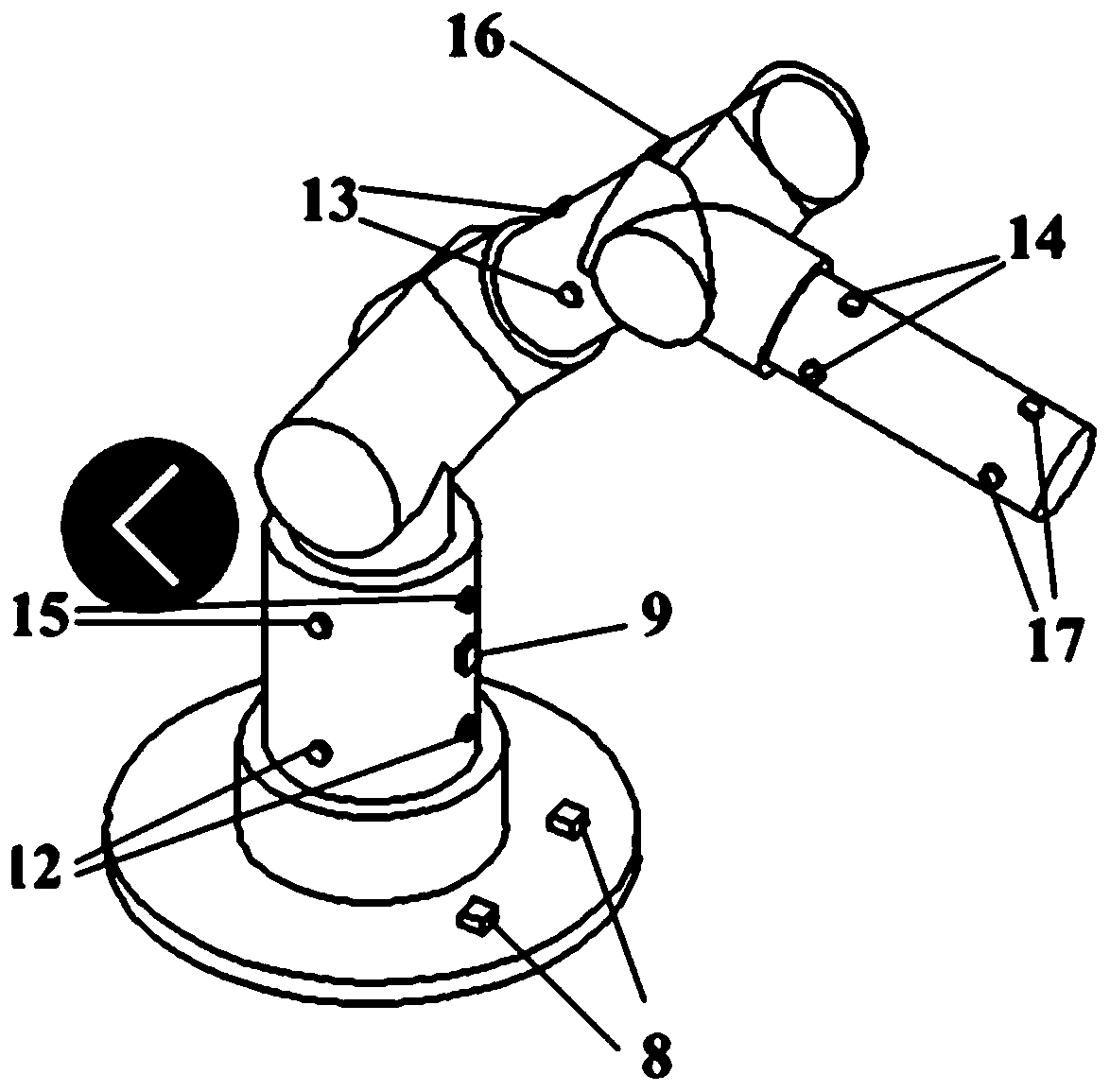
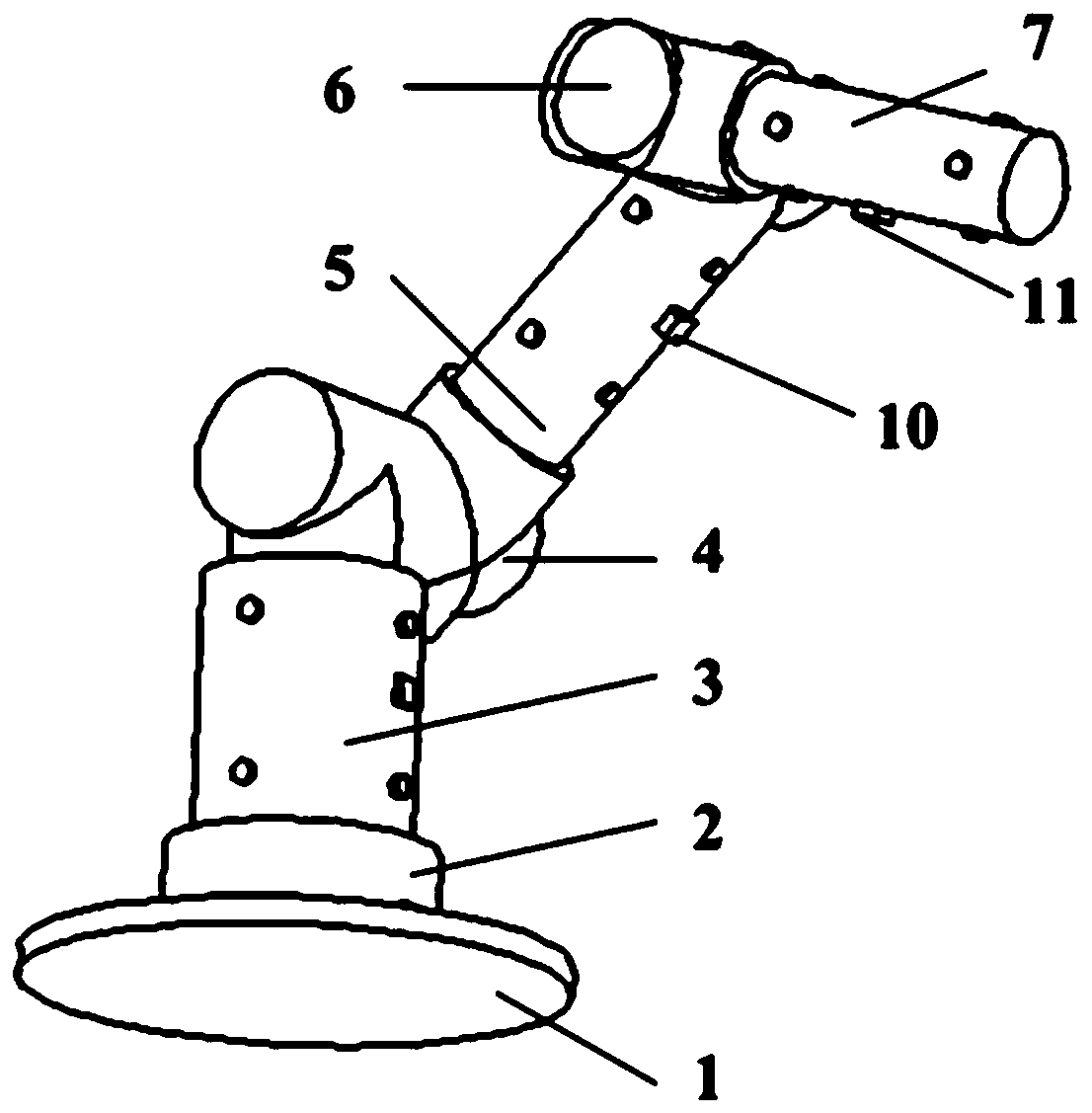
[0038] see Figure 1~3 , in an embodiment of the present invention, a multi-sensing-based collaborative robot obstacle avoidance system includes a collaborative robot, an attitude sensor, a UWB ranging module, an ultrasonic module, an image acquisition module, a pose and spatial information calculation unit, and an obstacle avoidance system. Executing mechanism; the attitude sensor, UWB ranging module, ultrasonic module and image acquisition module are connected to the input end of the pose and spatial information computing unit, and the output of the obstacle avoidance actuator is connected to the pose and spatial information computing unit The collaborative robot includes a base 1 and a first-level articulated arm 3, a second-level articulated arm 5, and a third-level articulated arm 7 distributed in multiple angles in the space, and the base 1 is equipped with joints that control the movement of the first-level articulated arm 3 Motor I2, the other end of the first-stage ar...
Embodiment 2
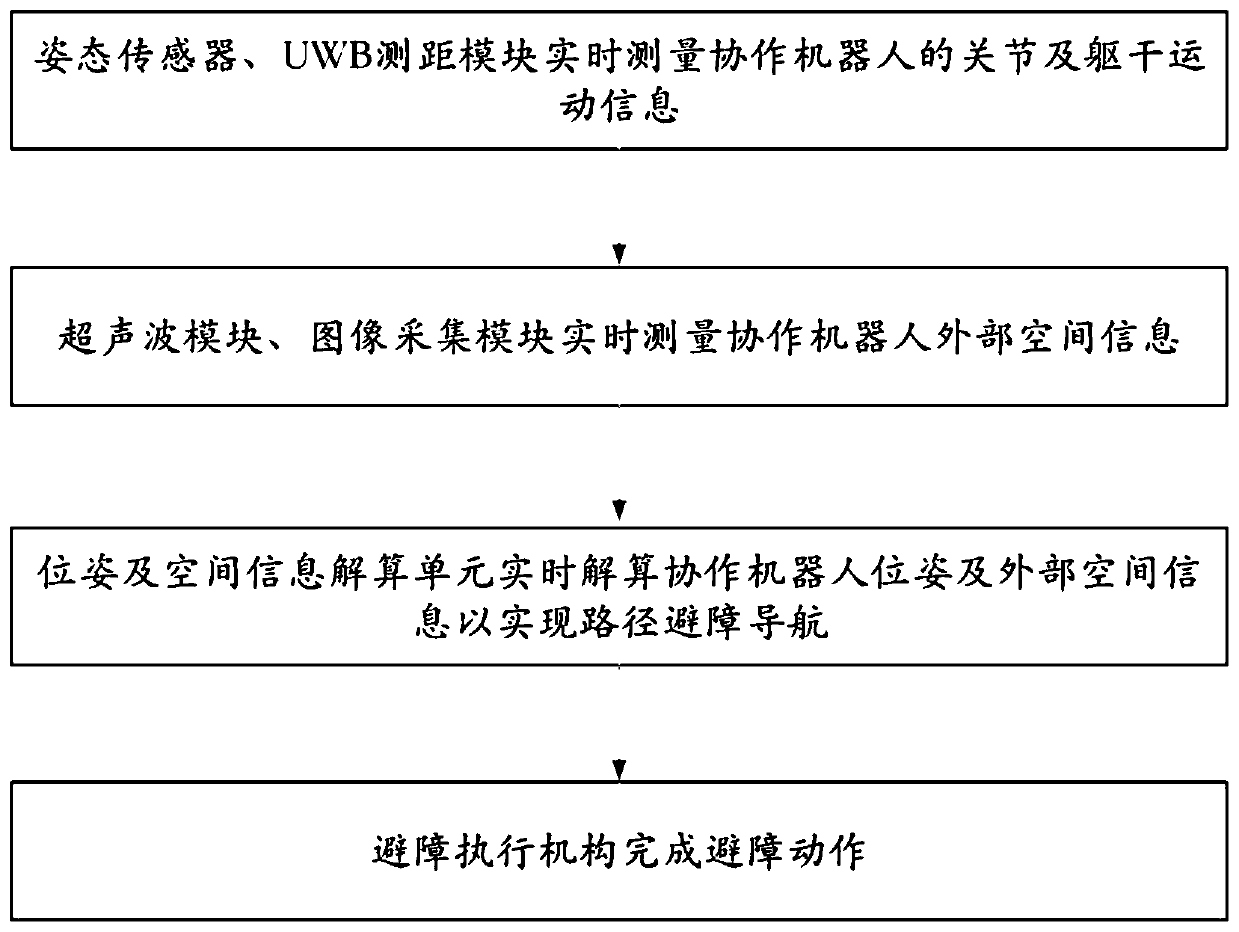
[0048] The control method of the collaborative robot obstacle avoidance system based on multi-sensing as described in embodiment 1, comprises the following steps:
[0049] Step 1: The collaborative robot is powered on and initialized, and the operator inputs the motion information of joint motor Ⅰ2, joint motor Ⅱ4, and joint motor Ⅲ6 to the path planning database;
[0050] Step 2: Each ultrasonic module on the first-level articulated arm 3, the second-level articulated arm 5, and the third-level articulated arm 7 detects the external space information in real time, and the ultrasonic modules on the first-level articulated arm 3, the second-level articulated arm 5, and the third-level articulated arm 7 Each image acquisition module detects external space information in real time;
[0051] Step 3: Attitude sensor and UWB ranging module measure the attitude information of the first-level articulated arm 3, the second-level articulated arm 5, and the third-level articulated arm 7 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More