

Minimum Step Formation Method for Multiple Mobile Robots
A mobile robot and multi-robot technology, applied in two-dimensional position/channel control and other directions, can solve problems such as inability to meet high-efficiency formation tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The novel technical solution of the present invention will be further described below in conjunction with accompanying drawings and actual formation cases.
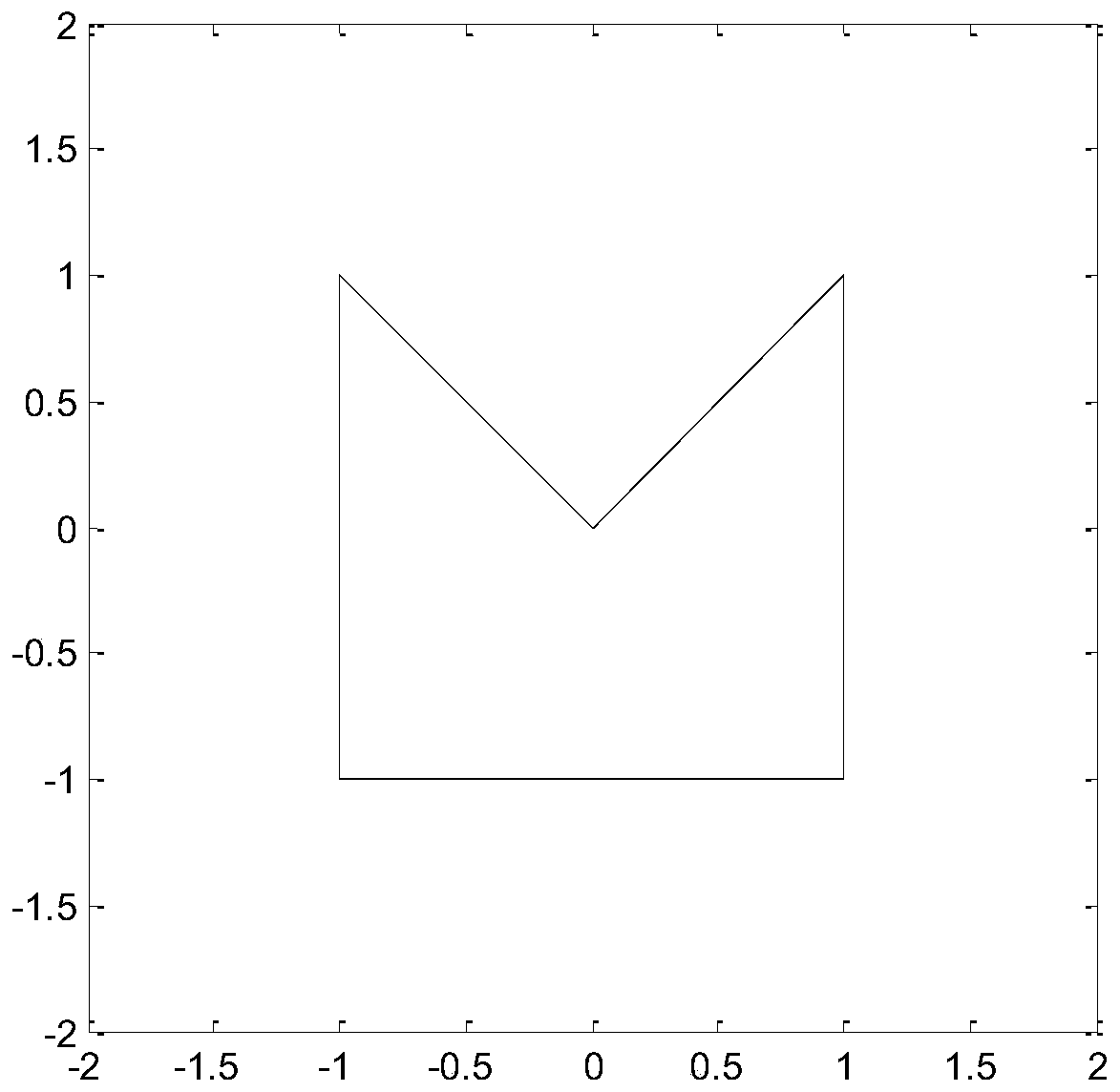
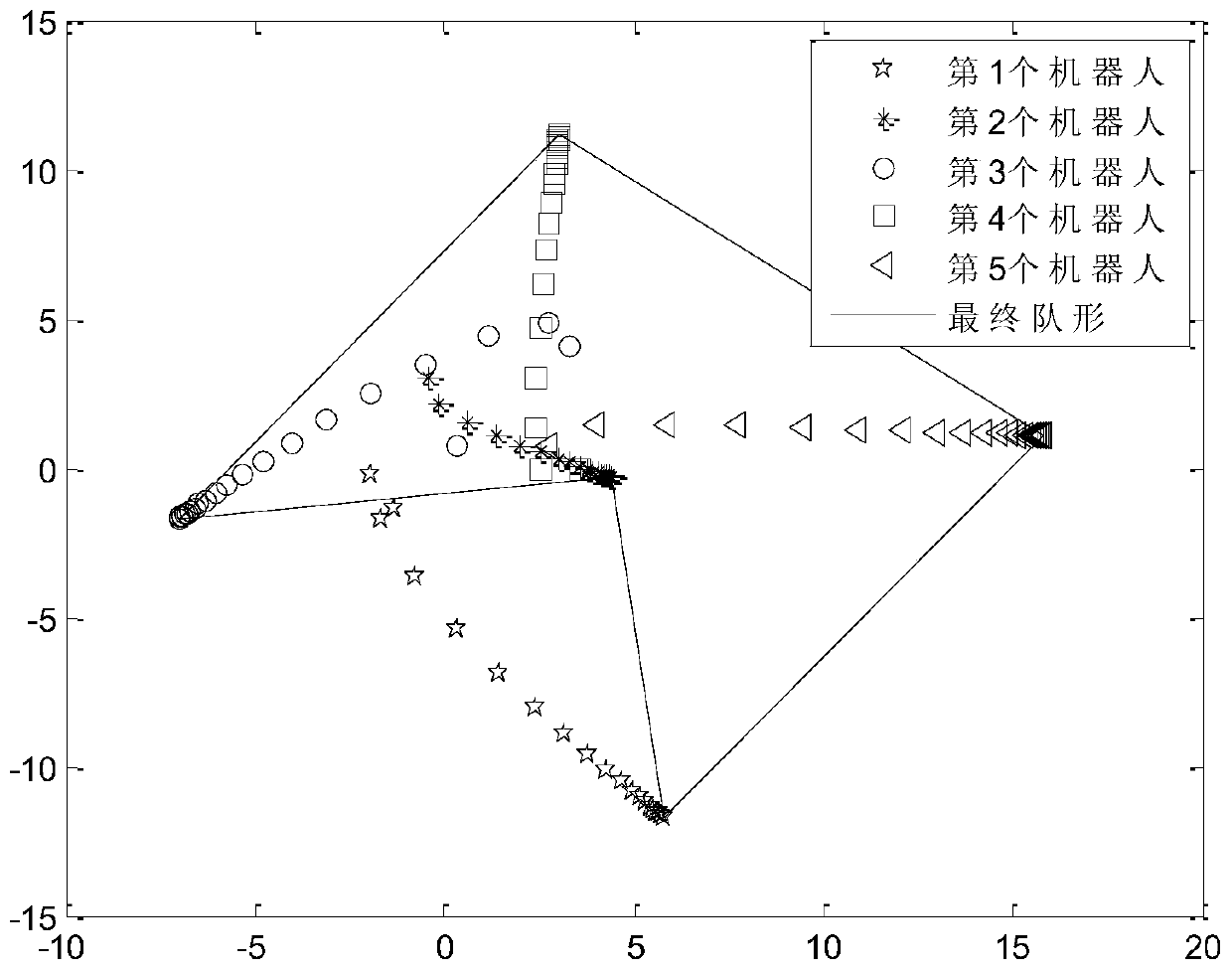
[0075] For a multi-moving human system consisting of 5 robots, the 5 robots are distributed on a two-dimensional plane, and their coordinates are (-1.3077,-1.3499), (-0.4336, 3.0349), (0.3426, 0.7254), (3.5784 ,-0.0631), (2.7694,0.7147), which needs to be composed as figure 1 The specific shape formation shown, the shape can be represented by coordinates in the two-dimensional plane space as (-1,1), (0,0), (1,1), (1,-1), (-1,- 1) Deduce the algorithm process for this case:
[0076] Step 1, establish the motion model of multiple mobile robots in the complex plane
[0077] First establish a global coordinate system, and represent the two-dimensional plane space where the multi-robot moves with a complex plane. The coordinates of any point on the two-dimensional plane are expressed as (a, b), then the point is expre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More