

Vehicle position and gesture estimation method based on traffic sign
A technology for traffic signage and pose estimation, which is applied in computing, computer components, image analysis, etc., and can solve problems such as limited ground texture clarity, difficulty in maintaining databases, and complex databases
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
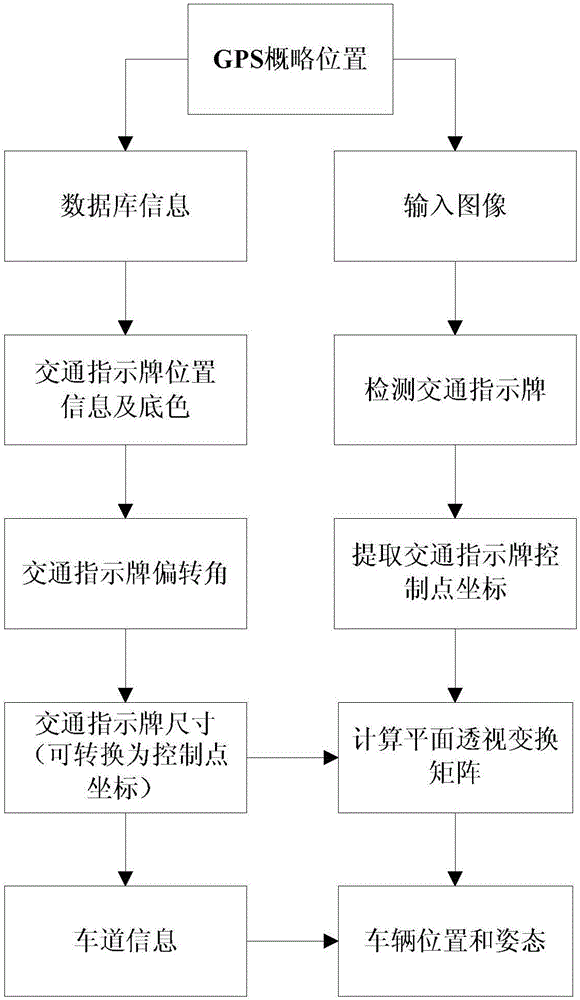
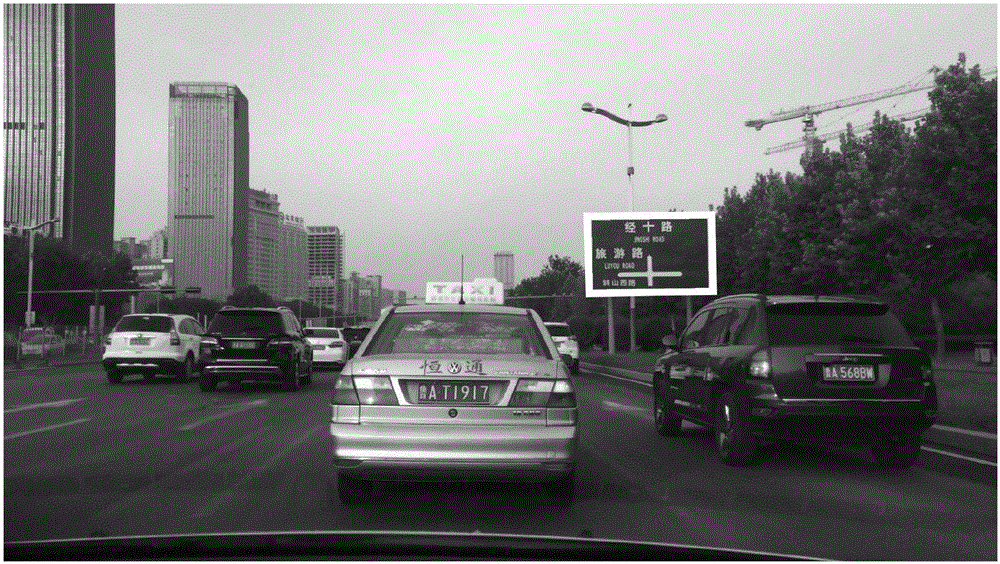
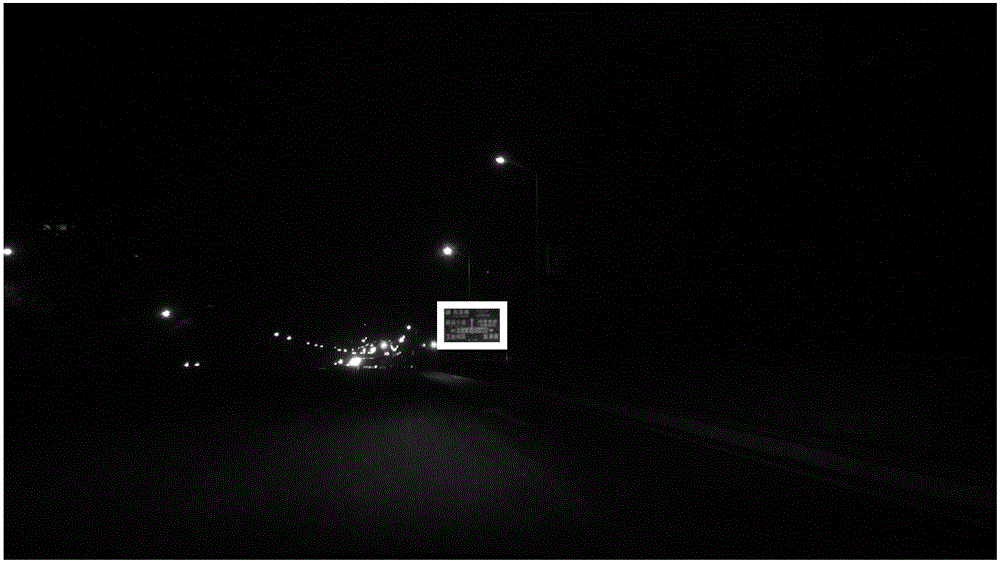
[0084] A vehicle pose estimation method based on traffic signs, such as figure 1 As shown, the traffic sign refers to a flat rectangular target located at a prominent position on both sides of the road, and its background color is mainly blue, green or yellow; the steps involved are as follows:
[0085] A. Build a database
[0086] The database includes the following information of each traffic sign: geographical coordinates, the size of the traffic sign, the angle between the traffic sign and the road, the lane information at the traffic sign, and the background color. The geographic coordinates refer to the longitude and latitude where the traffic sign is located The geographic coordinates of the traffic sign are measured by the handheld RTK-GPS instrument; the size of the traffic sign includes the length and width of the traffic sign; the lane information at the traffic sign includes the number of lanes on the road and the width of the lane and lane guidance; geographic co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More