

Nonlinear flexural deflection estimation method based on inertial measurement matching
A flexural deformation and inertial measurement technology, applied in the field of nonlinear flexural deformation estimation based on inertial measurement matching, can solve problems such as increasing the cost of the deformation measurement system, and achieve the effects of high calculation accuracy and accurate measurement equations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
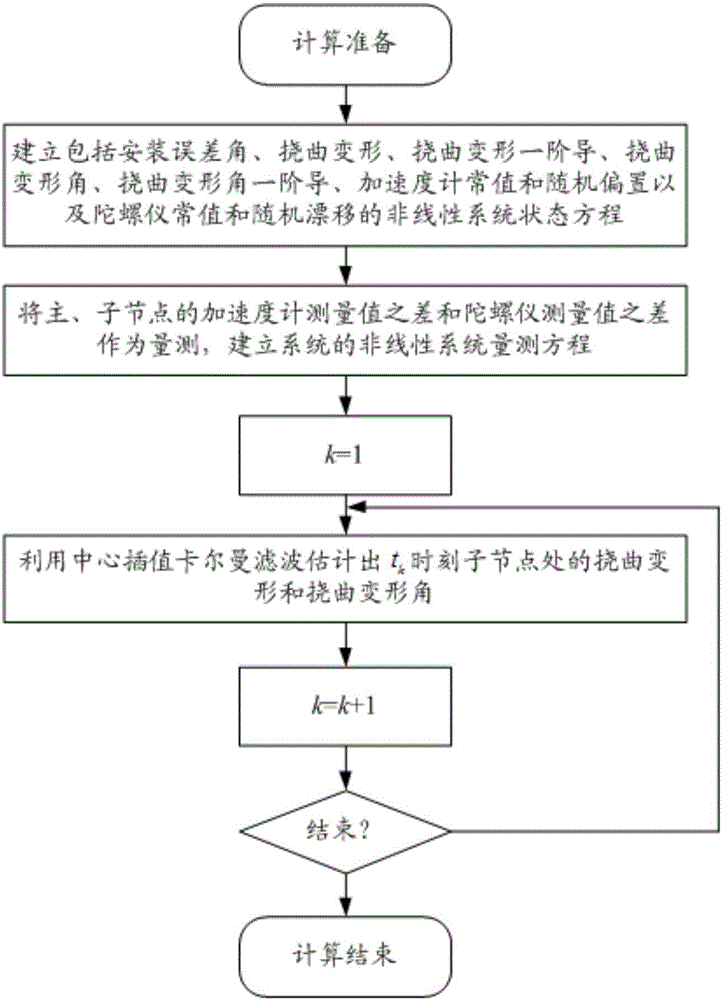
[0015] As attached to the manual figure 1 Shown, concrete implementation of the present invention comprises the following steps:
[0016] 1. Establish non-linear parameters including installation error angle, deflection, first-order derivative of deflection, angle of deflection, first-order derivative of deflection angle, constant value and random bias of accelerometer, constant value and random drift of gyro The state equation of the linear system is specifically:
[0017] (1) Establish a fixed installation error angle mathematical model
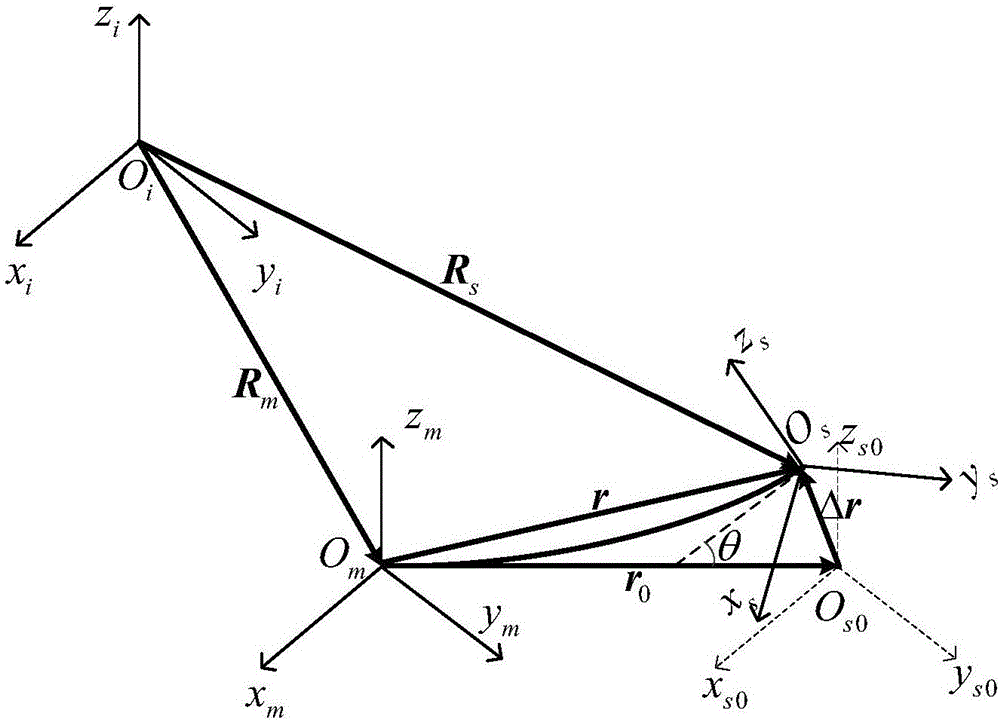
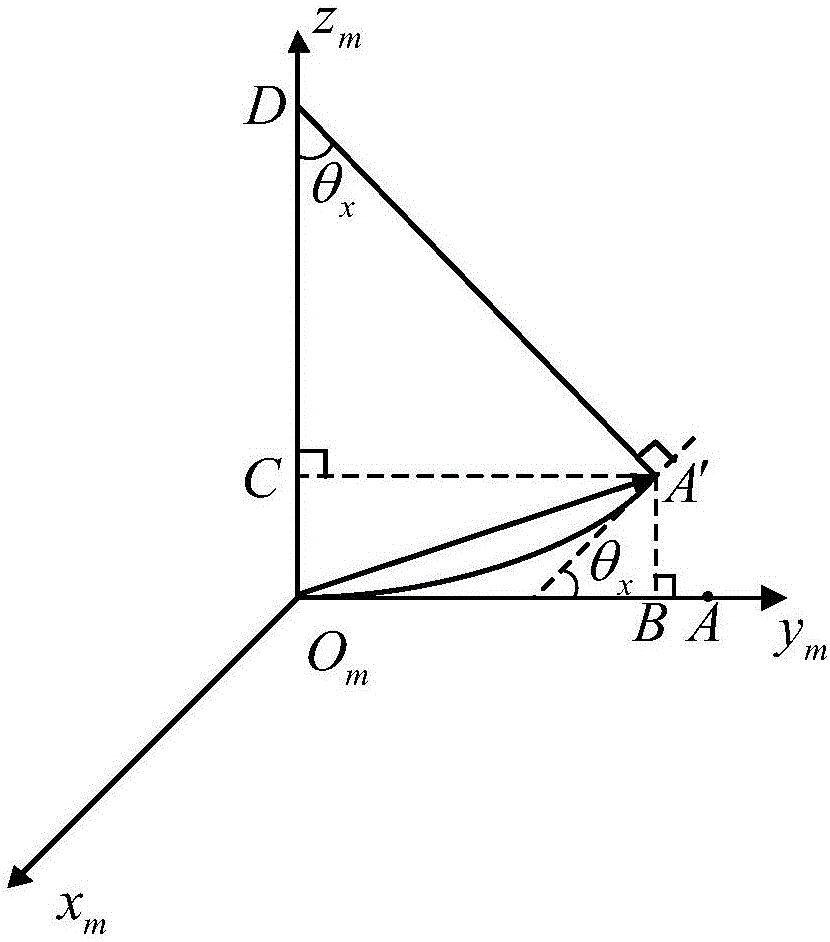
[0018] as attached figure 1 As shown in the schematic diagram of system deflection and deformation, the relevant coordinate systems include: the earth inertial coordinate system O i x i the y i z i ; The inertial measurement unit (Inertial Measurement Unit, IMU) coordinate system at the master node O ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More