

Vision-inertia integrated SLAM (Simultaneous Localization and Mapping) method based on genetic algorithm
A technology of genetic algorithm and inertial combination, applied in the SLAM field of visual-inertial combination, can solve the problems of slow update of visual navigation data, influence of camera, accuracy and real-time influence of visual navigation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0163] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings;
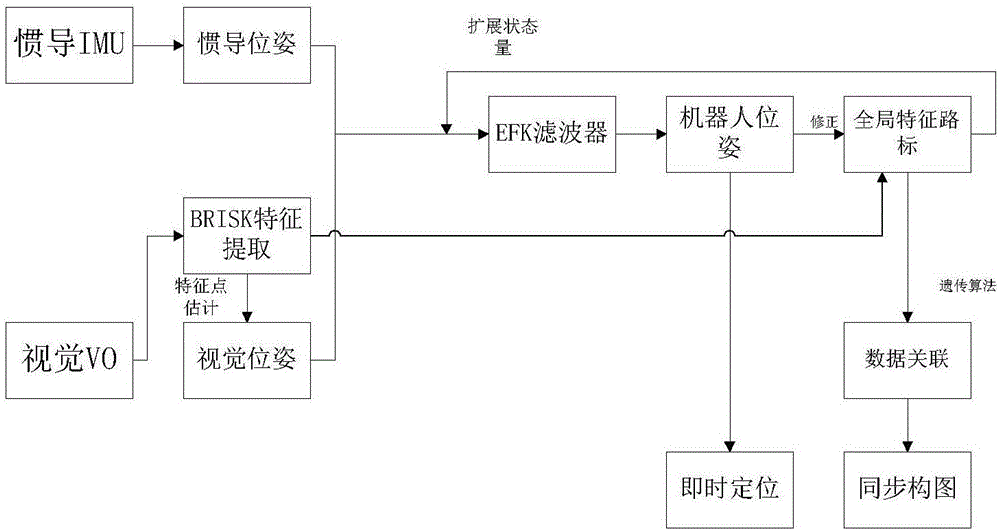
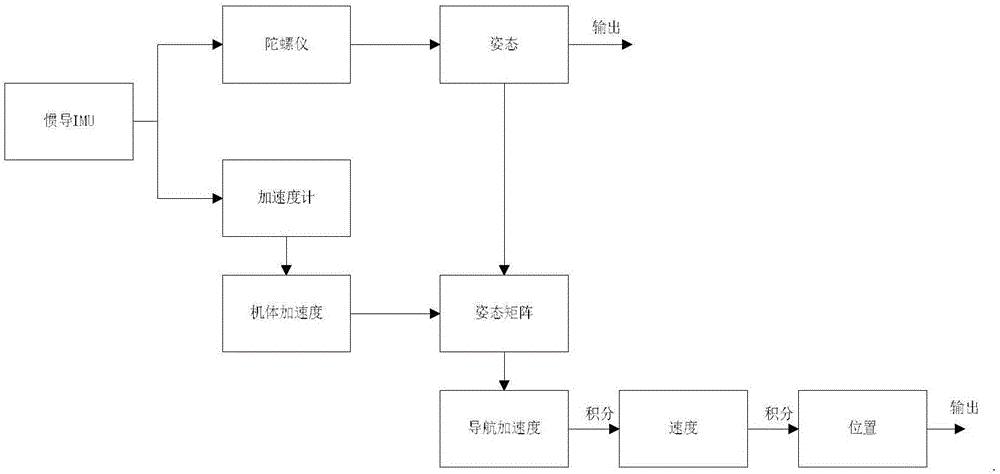
[0164] Such as Figure 1-5 Shown, a kind of SLAM method based on the visual-inertial combination of genetic algorithm described in the present invention, this method comprises the following steps:
[0165] Step 1: Unify the coordinate system, combine the body coordinate system and navigation coordinate system under inertial navigation with the camera coordinate system and navigation coordinate system under vision. The relationship between the two types of coordinate systems is mainly the rotation matrix R and the translation vector
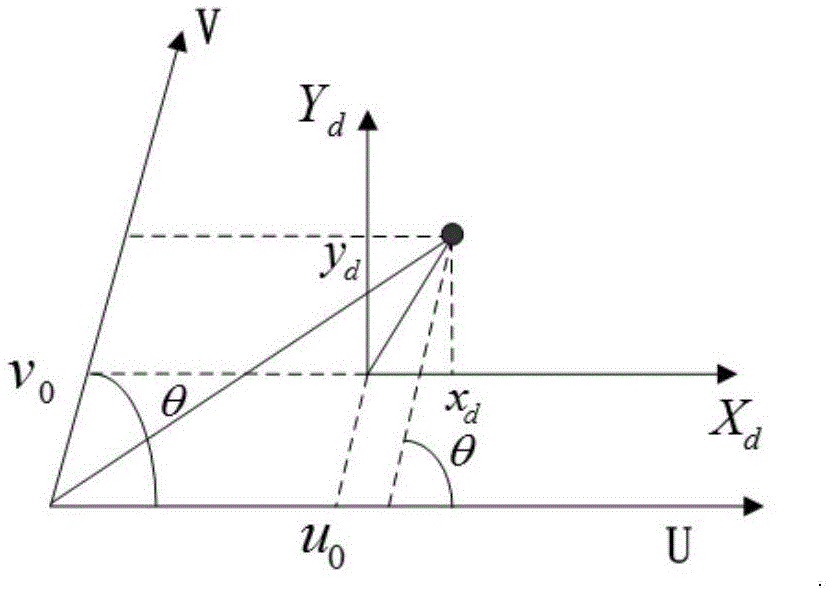
[0166] Step 2: Calibrate the binocular vision camera, obtain its internal reference matrix, external rotation parameter R and translation parameter t. In this way, the two-dimensional feature point coordinates of the image are corresponding to the three-dimensional motion coordinates of the robot. And through the cali...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More