

High-frequency induction welding system based on binocular vision and multi-axis manipulator
A technology of high-frequency induction welding and binocular vision, applied in the direction of high-frequency current welding equipment, welding equipment, welding equipment, etc., can solve the problems of high workpiece size requirements, incompatibility of positioning tooling, poor positioning accuracy, etc., and achieve simplified operation Steps, flexible movement of equipment, and the effect of reducing production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
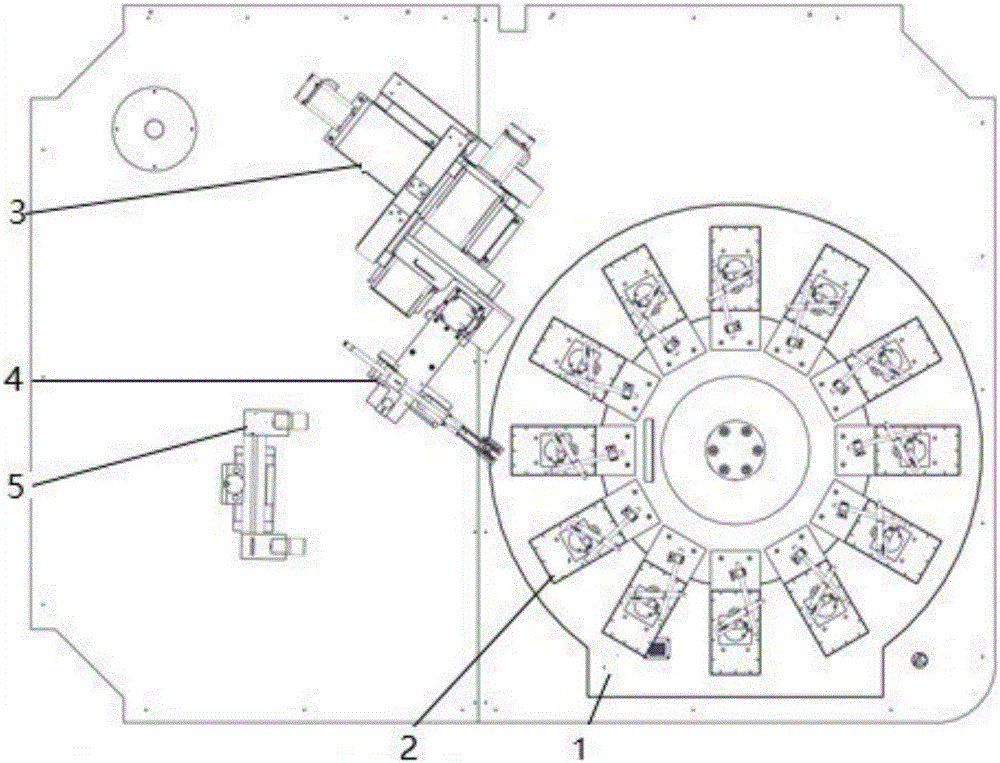
[0022] Such as Figures 1 to 3 As shown, the high-frequency induction welding system based on binocular vision and multi-axis manipulator of the present invention includes the following structures:
[0023] An indexing turntable 1, on which a number of workpieces 2 to be processed are evenly arranged in a circular shape, and the power mechanism is controlled by the control device to drive it to rotate around the central axis;
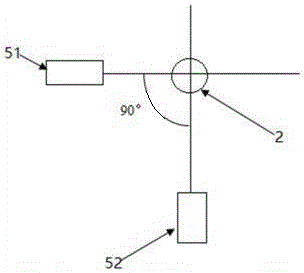
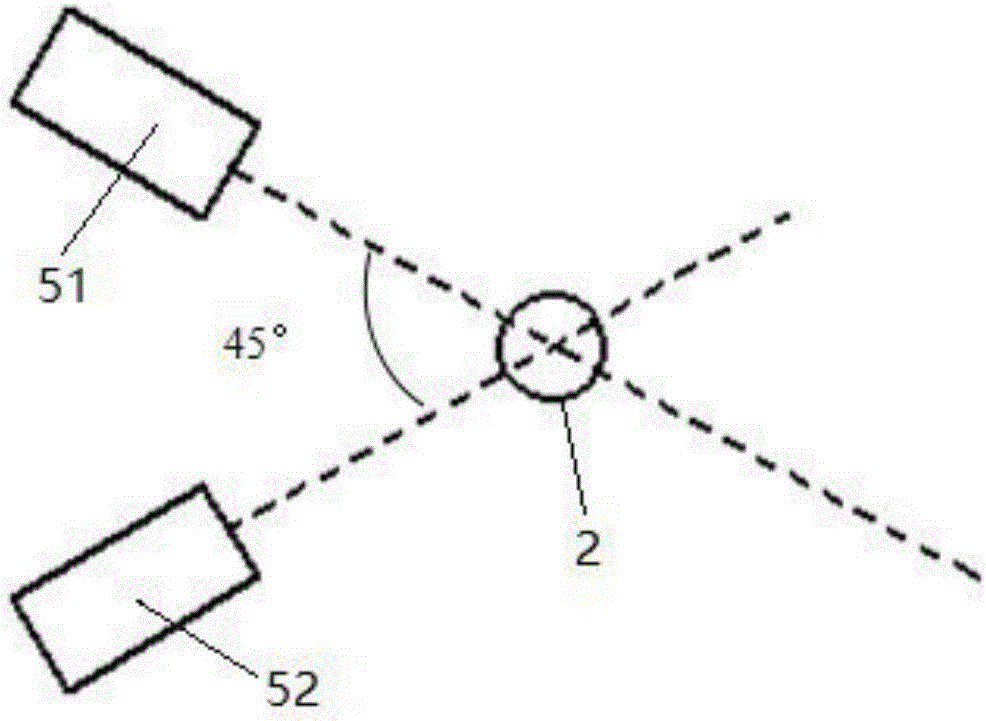
[0024] The binocular visual detectio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More