

Compliance control method and system based on collaborative operation of double-arm robot
A collaborative operation and compliant control technology, applied in general control systems, control/regulation systems, program control, etc., can solve problems such as safe and reliable control methods that have not yet been proposed, and achieve the effect of reducing requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
[0032] The present invention provides a compliant control method based on the cooperative operation of dual-arm robots, which includes the following steps:
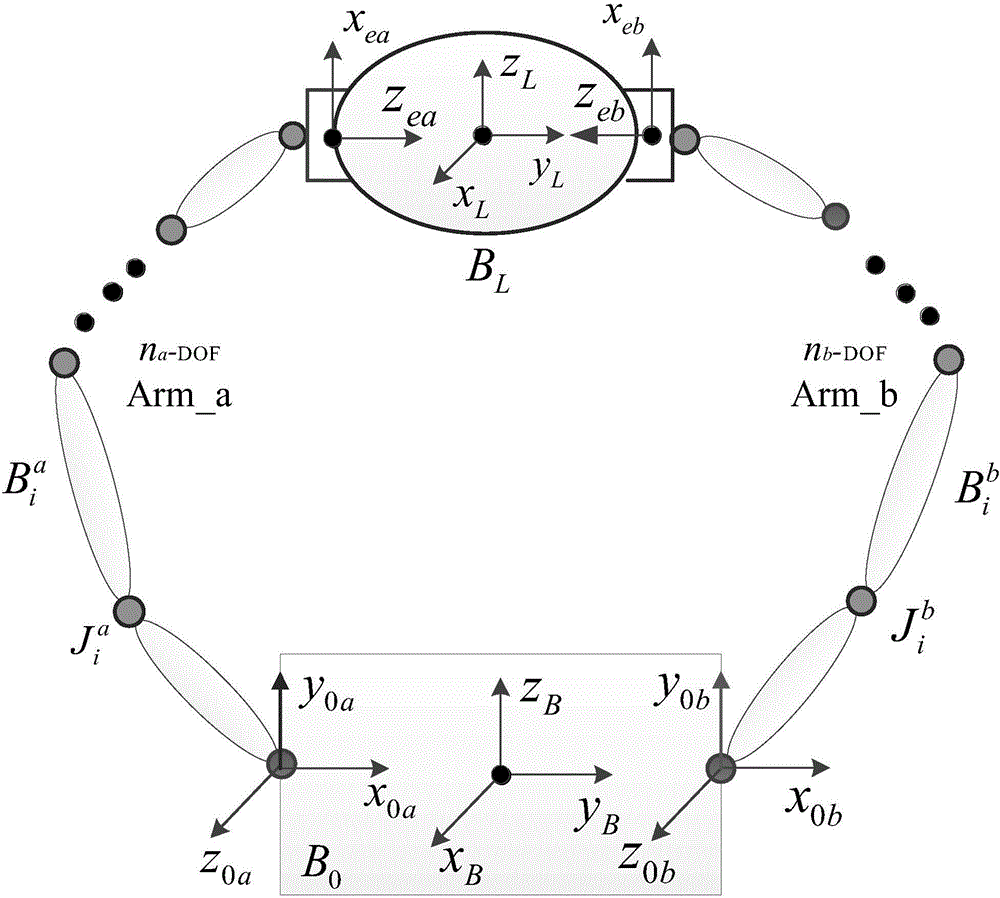
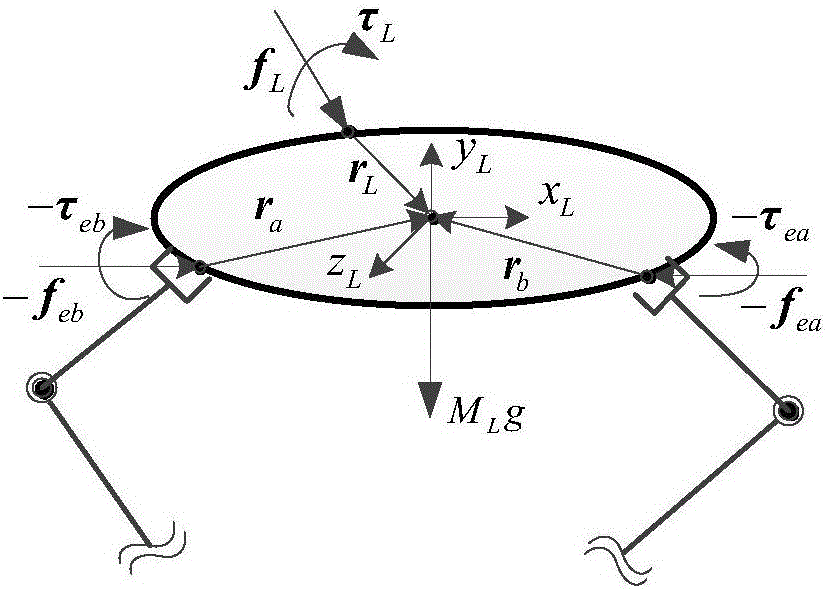
[0033] The dual-arm cooperative control module establishes a dynamic model according to the expected motion trajectory and expected force of the target load, and obtains the desired terminal pose and terminal expected force of each manipulator by satisfying the coordinated position decomposition and public force decomposition of the double-arm closed-chain constraint equation;
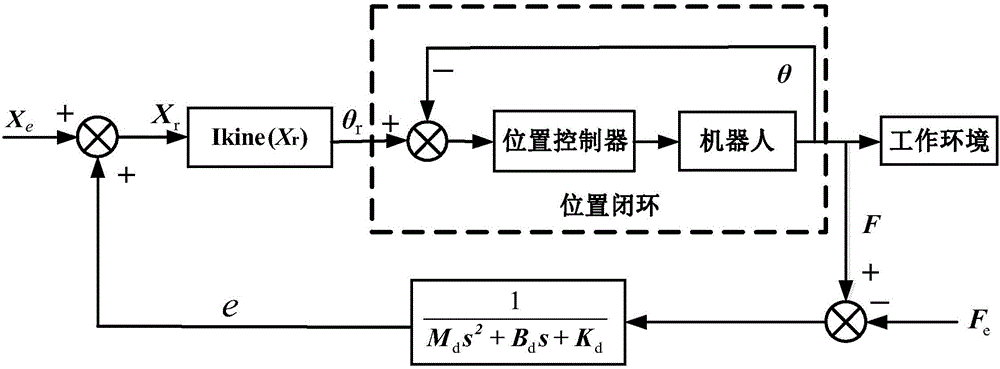
[0034] The single-arm control module completes the analysis and execution of the expected task instructions, obtains the expected angles of each joint of the manipulator, and realizes the force-compliant operation of the manipulator through position-based impedance control;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More