Anti-collision sensor and welding robot
An anti-collision and sensor technology, applied in the field of sensors, can solve the problem that the anti-collision sensor cannot be reset automatically
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
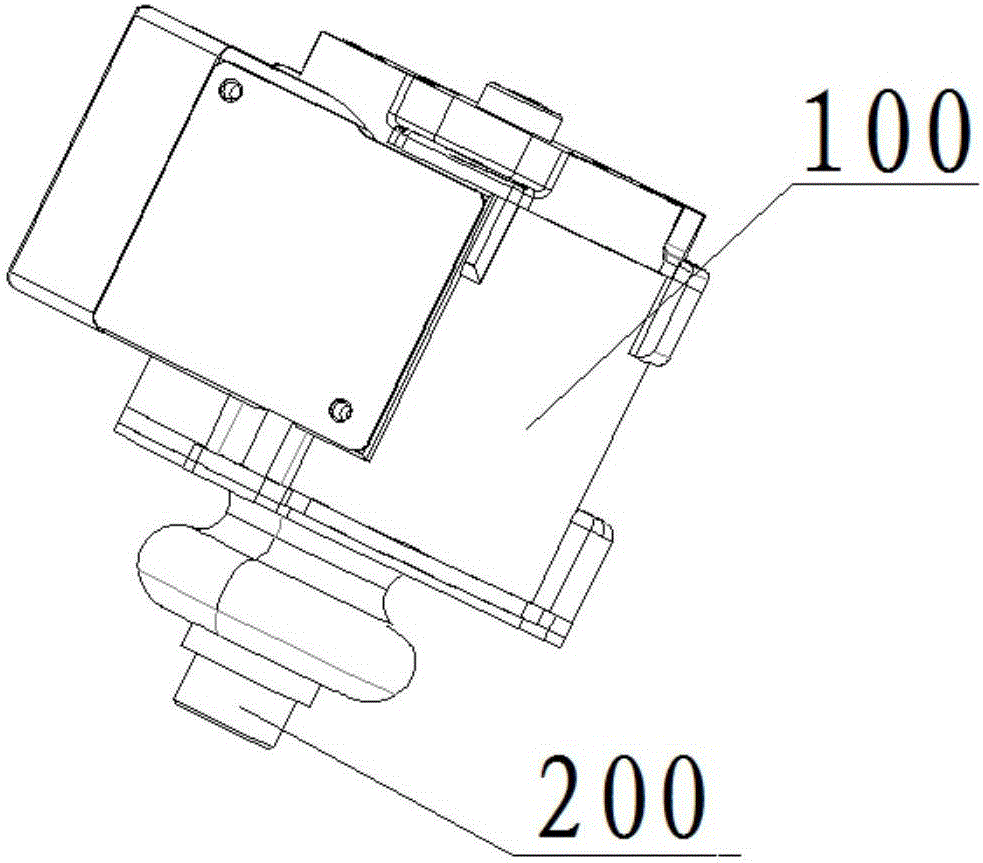
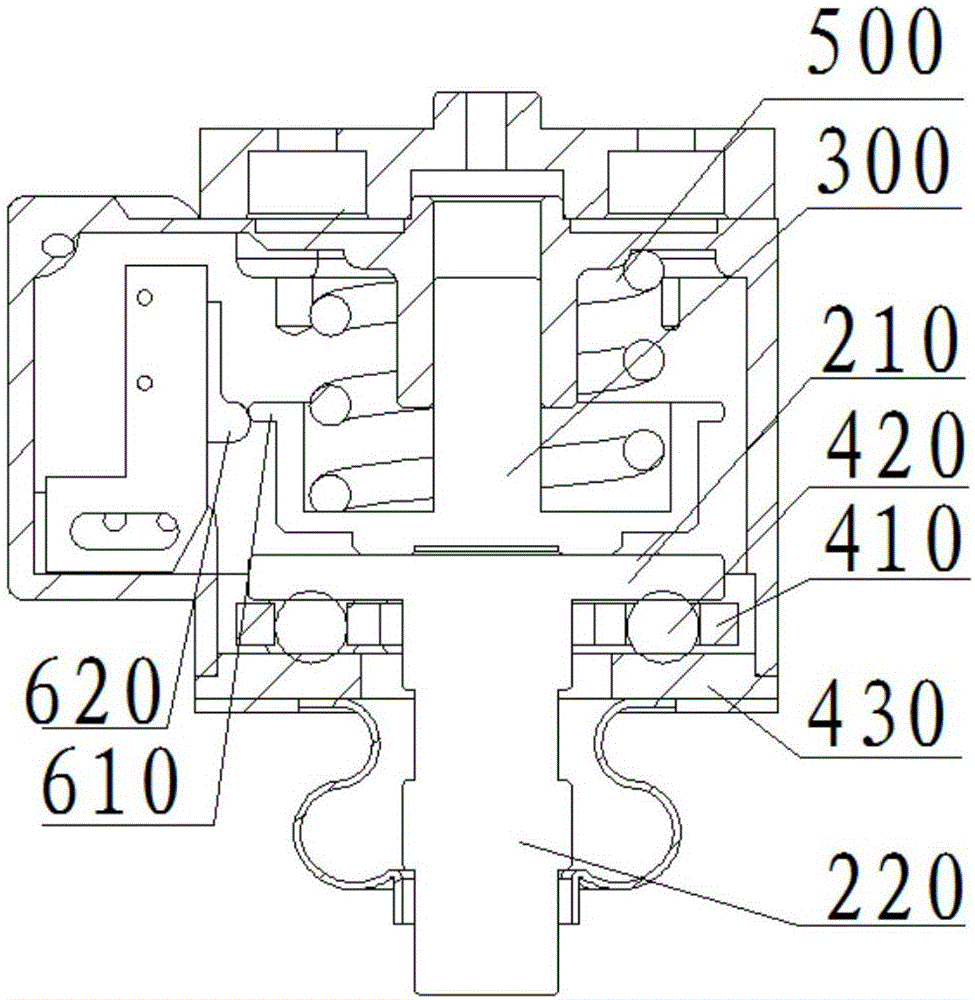
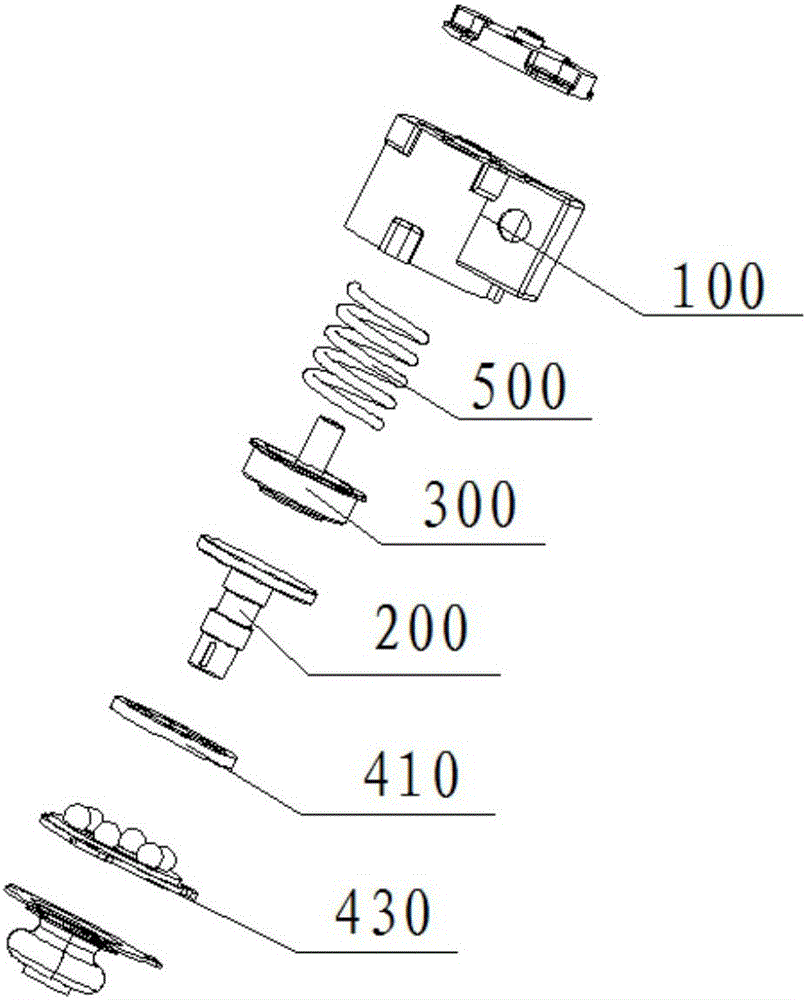
[0033]The anti-collision sensor provided by the present invention is connected to the movable working end, and includes: a casing 100, the opposite ends of the casing 100 are respectively slidably provided with a transmission part 200 and a sliding part 300, and the transmission part 200 is arranged on the sliding part 300 Between the movable working end and the movable working end, when the movable working end is hit by an external force, the transmission member 200 transmits the external force to the sliding member 300 to make the sliding member 300 slide relative to the housing 100 . The anti-collision sensor includes a sensing mechanism and a control mechanism. When the displacement of the slider 300 relative to the housing 100 exceeds a certain value, the control mechanism will stop the movement of the movable working end, thereby preventing the movable working end from being damaged due to collision. An elastic member is provided between the sliding member 300 and the inn...
Embodiment 2
[0047] The difference from Example 1 is that, as Figure 5 As shown, a plurality of wedge-shaped structures 810 and protrusions 820 are respectively provided on the opposite surface of the transmission plate 210 and the inner wall of the housing 100 , and the protrusions 820 abut against the slopes of the wedge-shaped structures 810 . Take the protrusion 820 on the rotating disk and the wedge-shaped structure 810 on the inner wall of the casing 100 as an example. When there is no collision, the protrusion 820 is located at the bottom of the wedge-shaped structure 810. When rotating force, the transmission shaft 220 will give a torque to the transmission disc 210, the protrusion 820 on the transmission disc 210 is limited by the wedge structure 810, the protrusion 820 can only move upward along the slope of the wedge structure 810, and then drive The sliding part 300 slides, so that the conversion of torsional displacement and linear displacement is realized. After the displace...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com