

Gear-driven bidirectional parallel clamping perceiving self-adaptive robot finger device and control method
A technology of robot finger and gear transmission, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of empty travel, crushed objects, transmission chain length, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
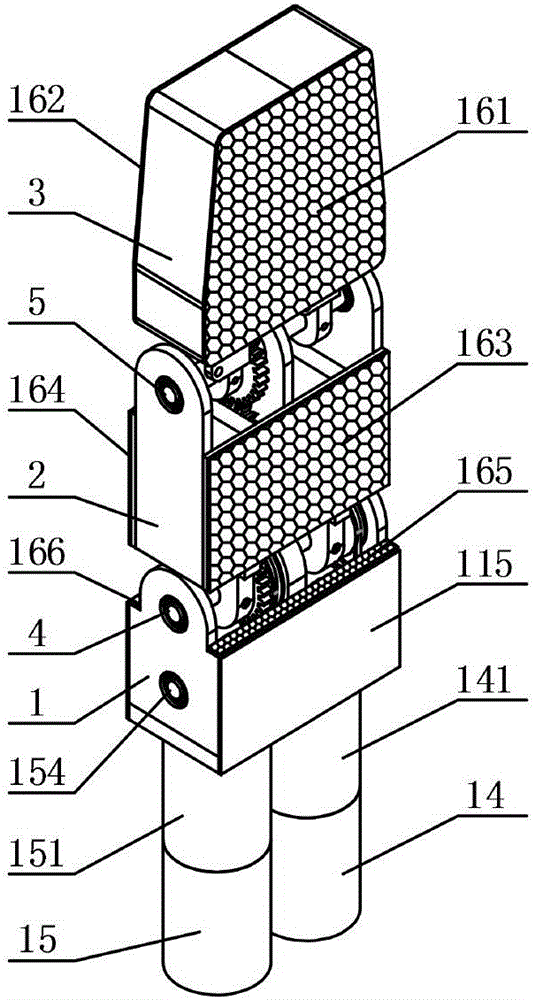
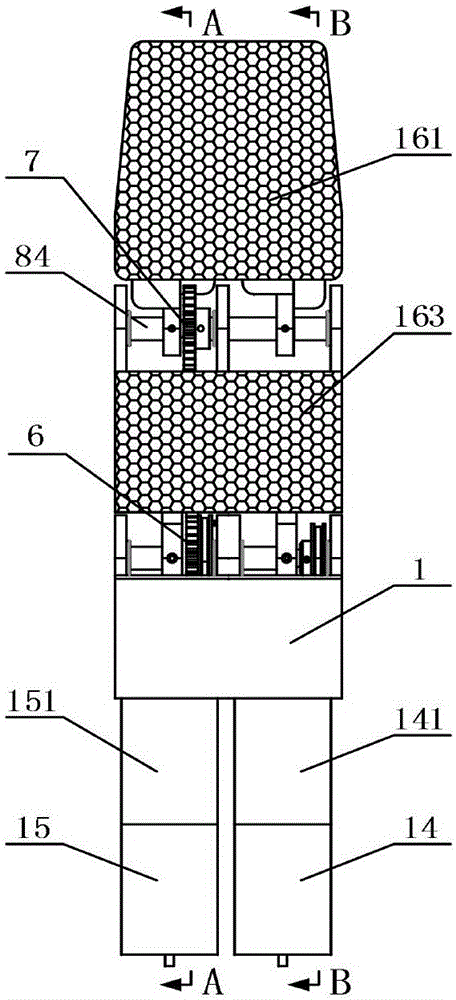
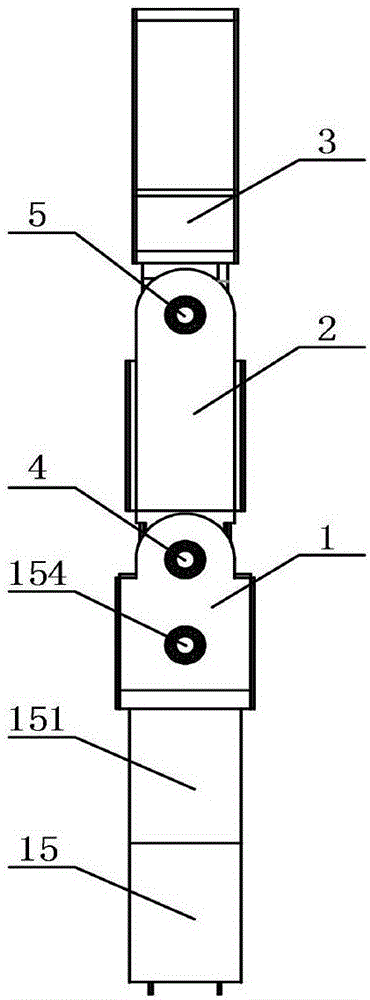
[0082] An embodiment of the gear drive two-way flat clip perception adaptive robot finger device designed by the present invention, such as Figure 1 to Figure 12 As shown, it includes a base 1, a first finger segment 2, a second finger segment 3, a proximal joint shaft 4, a distal joint shaft 5, a first motor 14, a second motor 15, a first stop sensor 161, a second stop sensor Grasp sensor 162, first contact sensor 163, second contact sensor 164, first parking sensor 165, second parking sensor 166, initial position sensor 167, control module 121, motor drive module 122 and first transmission mechanism, second transmission Mechanism, first gear 6, second gear 7, gear set 8.
[0083] The first motor 14 is fixedly connected to the base 1 , the second motor 15 is also fixedly connected to the base 1 , and the axis of the proximal joint shaft 4 is parallel to the axis of the distal joint shaft 5 .
[0084] The control module 121 includes a first parking input terminal, a second p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More