

Multi-information-fusion-based high precision localization method for unmanned vehicle
An unmanned vehicle and multi-information fusion technology, applied in the direction of road network navigator, etc., can solve the problems of different environmental differences and different detection ranges of sensors, so as to improve the running speed, ensure real-time requirements, and have a wide range of applications Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific implementation steps and accompanying drawings. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
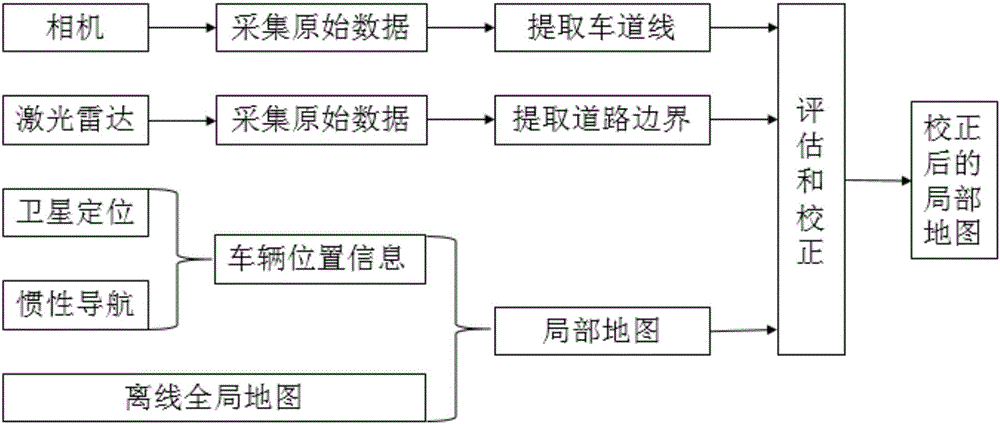
[0043] like figure 1 As shown, the present invention is based on the high-precision positioning method of multi-information fusion, comprising the following steps:
[0044] Step 1, obtain information from multiple data sources. include:
[0045] 1) The map module, combined with high-precision maps and integrated positioning systems, extracts local maps of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More