

Multi-target tracking method and system for flicker noise
A multi-target tracking and flicker noise technology, which is applied in the field of multi-target tracking methods and systems to solve tracking problems and improve tracking accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
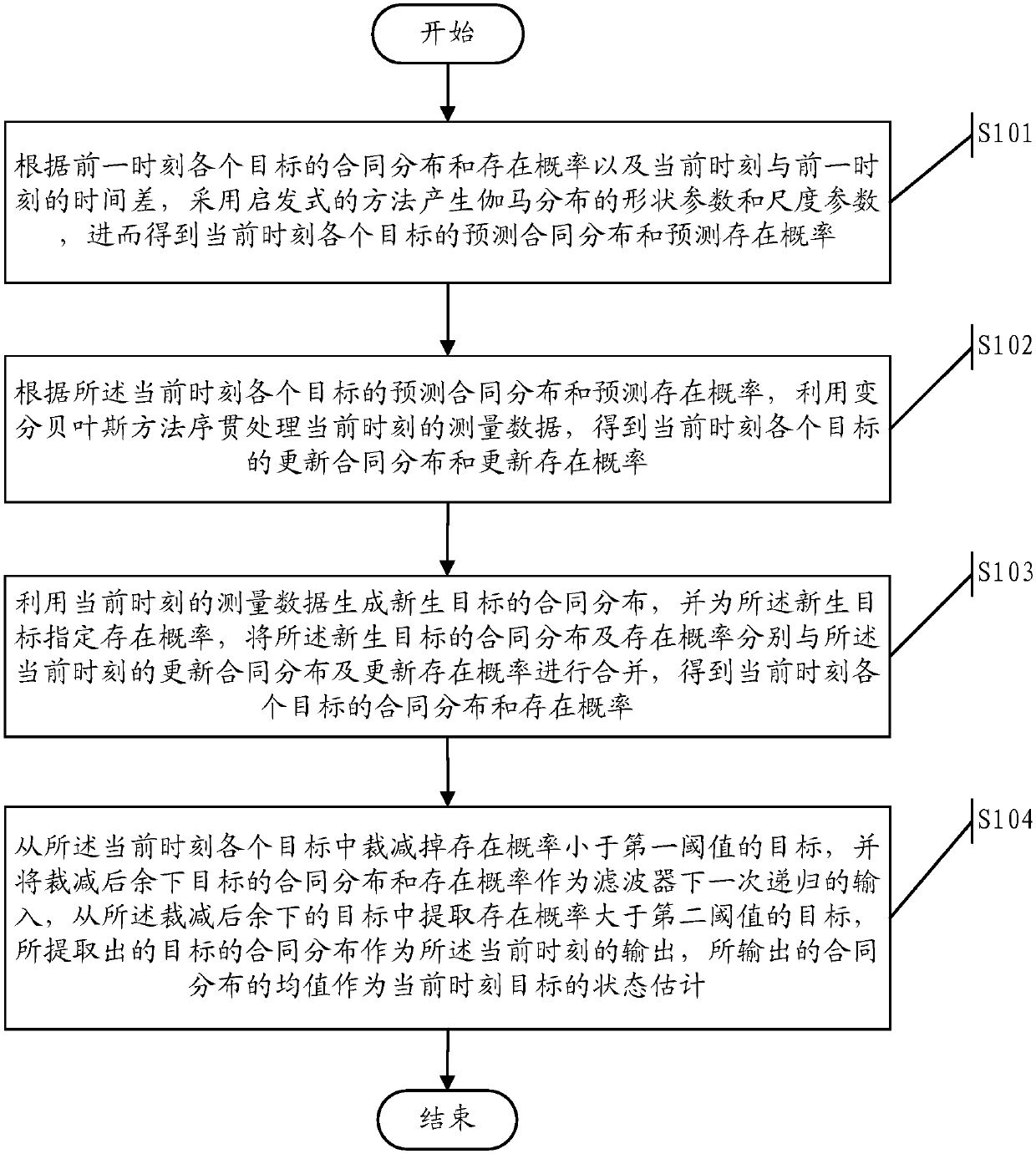
[0022] According to the contract distribution and existence probability of each target of the measurement data received at the previous moment, the embodiment of the present invention predicts the contract distribution and existence probability of each target of the new measurement data received at the current moment; according to the predicted contract distribution and existence probability, use The variational Bayesian method sequentially processes each measurement at the current moment to obtain the updated contract distribution and existence probability of each target; respectively merges the up...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More