

A GNSS anti-spoofing loop tracking method based on inertial information assistance and parameter estimation
A technology of parameter estimation and loop tracking, which is applied to satellite radio beacon positioning systems, measuring devices, instruments, etc., can solve problems such as inability to track real signals and spoofed signals separately, and achieve the effect of low complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings.
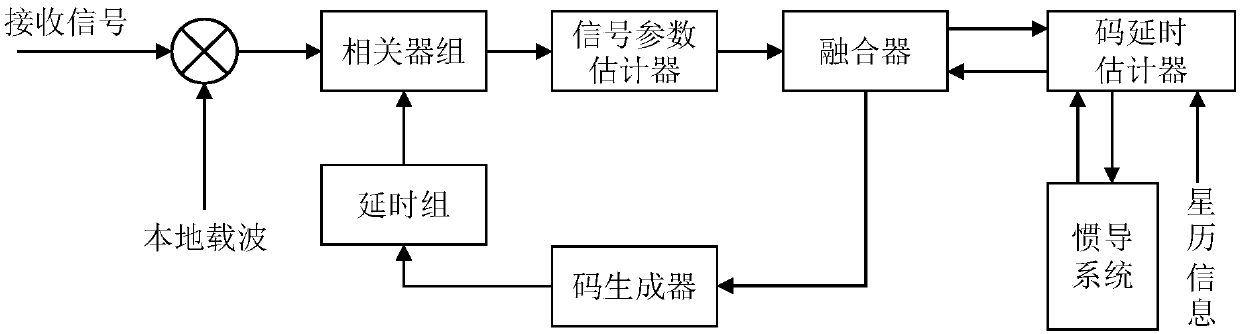
[0042] A GNSS anti-spoofing loop tracking method based on inertial information assistance and parameter estimation, including input signal, multiplier, local carrier generator, correlator, signal parameter estimator, inertial navigation system solution, ephemeris, code phase delay Time converter, fusion device, local code generator and delay device; divided into forward branch, auxiliary information branch and feedback branch; as figure 1 shown.
[0043] The forward branch includes an antenna, a receiving front end, a mixer, a correlator group, a signal parameter estimator and a fuser, which can obtain the amplitude, phase and code delay parameters of each satellite signal of the received signal. The satellite signal of spoofing interference can obtain two or more groups of signal amplitude, phase and code delay parameters through the signal parameter estimator; the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More