

Stability control method for time-delay-variable bilateral teleoperation system
A stable control method and operating system technology, applied in general control systems, adaptive control, control/regulation systems, etc., to achieve the effect of easy implementation and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach
[0064] Step 1: Establish two dynamic models of master and slave:
[0065]
[0066]
[0067]
[0068] in:
[0069] In the above formula m s =0.5kg, K=3, B=20. Indicates the expected speed of transmission from the master to the slave, x sc Indicates the expected position of the master transfer to the slave, and Respectively represent the actual speed of the master end and the slave end, the subscript m represents the master end, and the subscript s represents the slave end;
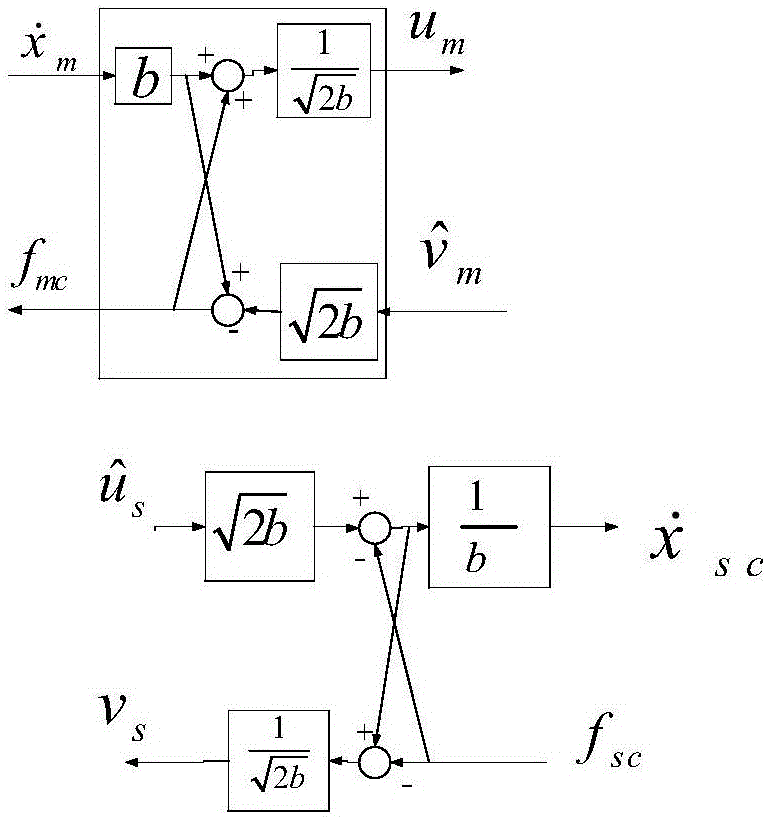
[0070] Step 2: Design the Channel Stabilization Controller
[0071] The wave variation method is used on each channel to ensure the stability of the channel. Specific steps are as follows:
[0072]
[0073]
[0074]
[0075]
[0076] Among them, b=2.5 is the wave variable parameter, u m (t) represents the forward wave variable of the main terminal, Indicates the reverse wave variable at the master end, Indicates the forward wave variable from the end, v s (t) represent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More