

Flexible mechanical arm composite control method based on intelligent learning evaluation
A flexible manipulator and compound control technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of poor control accuracy and achieve the effect of improving control accuracy and comprehensive feedback information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
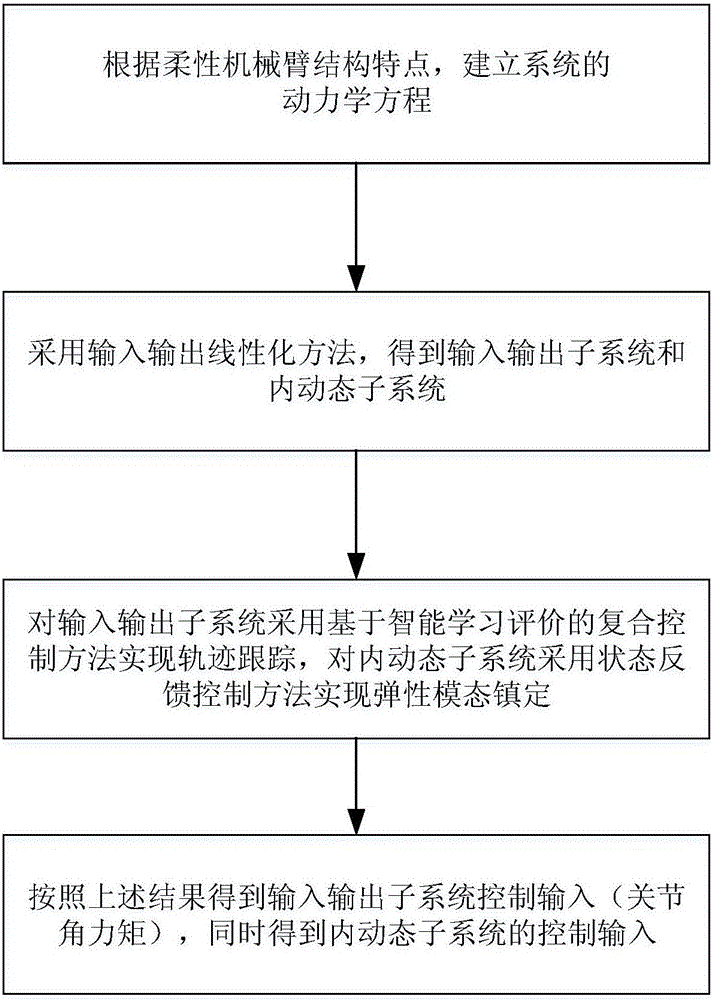
[0042] refer to figure 1 . The specific steps of the compound control method of the flexible manipulator based on intelligent learning evaluation of the present invention are as follows:
[0043] (a) Consider the dynamic model of a 2-DOF flexible manipulator:
[0044]
[0045] Among them, M is a positive definite symmetric inertia matrix, is a term related to Coriolis force and centripetal force, D 1 、D 2 is the damping matrix, K 2 is the stiffness matrix, and u is the joint input moment. is a generalized vector composed of the joint angle of the manipulator and the flexible mode, where θ i is the i-th joint angle variable, δ i,j is the jth modal variable of the ith link.
[0046] Connecting rod length l 1 = l 2 =0.5m, connecting rod mass m 1 =m 2 =0.1kg, connecting rod bending stiffness EI 1 =EI 2 =10N·m 2 , the terminal equivalent mass m p = 0.1 kg. deduced from this
[0047]
[0048]
[0049] i takes 1, 2, and the modal order m=2.
[0050] (b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More