

A domestic service robot path programming method based on a walking trajectory
A technology for path planning and home service, applied in instruments, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problem of sacrificing the flexibility of autonomous motion of robots, avoid expansion and improve navigation efficiency , improve the effect of real-time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
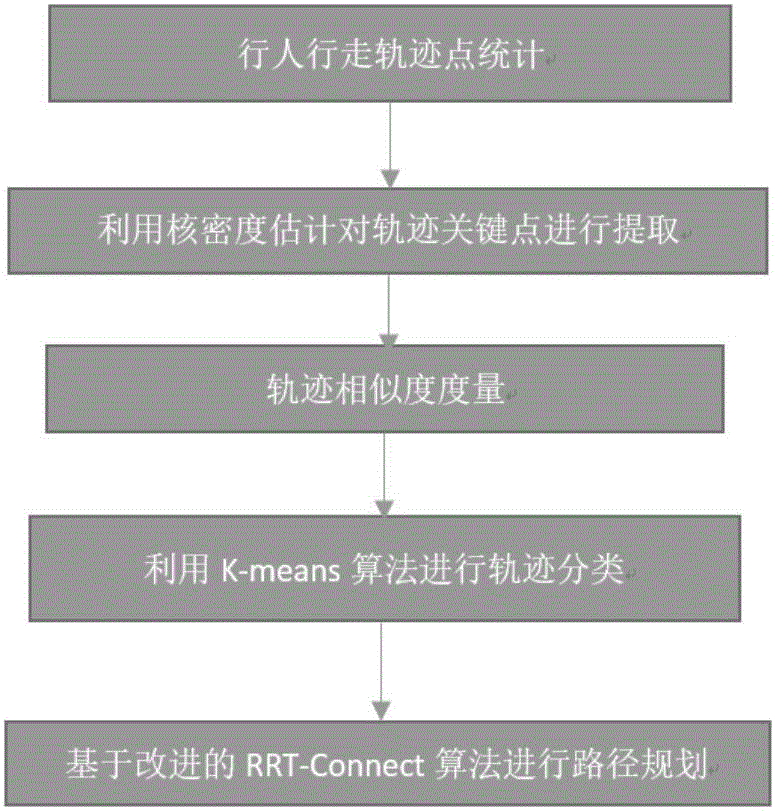
[0043] Such as figure 1 As shown, the embodiment of the present invention provides a path planning method for a home service robot based on walking trajectory, including the following steps:
[0044] Step 1: Extract the key points of the trajectory using kernel density estimation
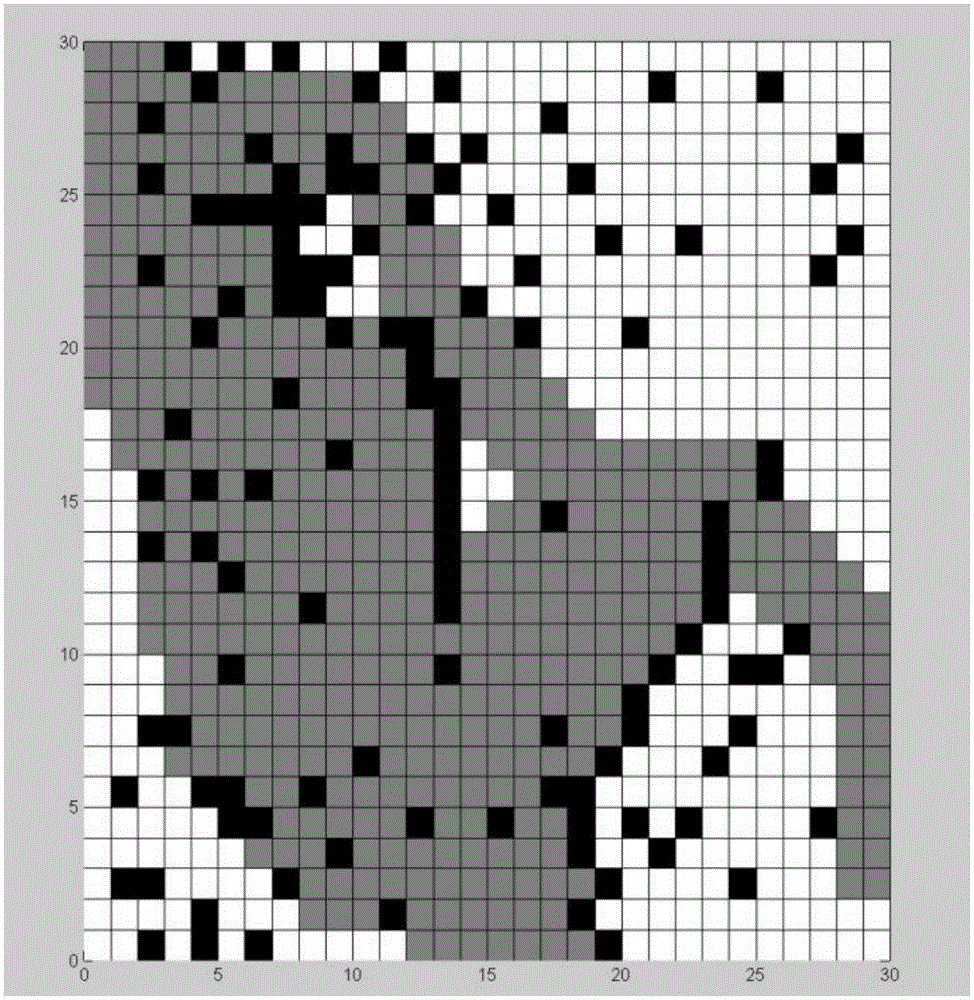
[0045] The target motion trajectory is a curve formed by connecting a series of directional data points extracted based on the positioning of the moving target, reflecting the historical law of the target motion. Before analyzing the trajectory of the target, we should first sort out what kind of movement path is called a trajectory. Considering that human activities in the family environment are highly purposeful and repetitive, human movements are usually driven by certain purposeful activities, such as eating, sleeping, and studying. Therefore, people's movement trajectories will show a certain degree of aggregation, which is generally distributed in an area or in a band. In order to accurately ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More