

Quick calibration method for robot vision system
A robot vision and calibration method technology, applied in the field of machine vision system calibration, can solve the problems of reduced efficiency, low distortion matrix efficiency, and increased influence of CCD camera detection accuracy, and achieves the effect of speeding up the calculation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
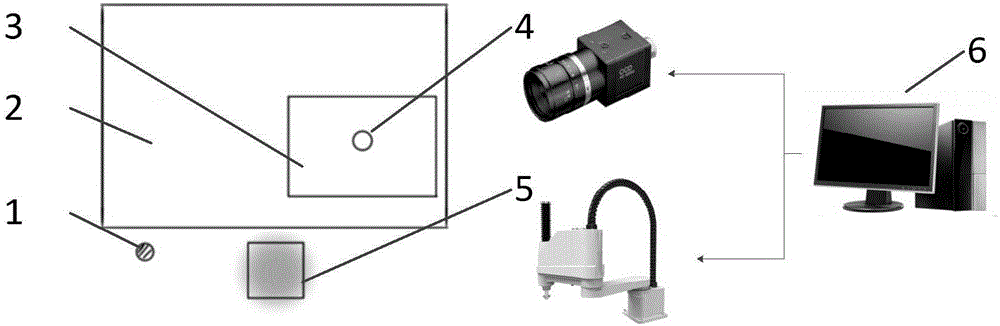
[0038] Such as figure 1 As shown, the present invention provides a fast calibration method for a robot vision system, wherein the robot vision system includes a robot 5, a work platform 2, a CCD camera 4 and a computer 6, wherein the robot 5 can use any model and needs to be able to perform high-precision positioning The CCD camera 4 has a fixed imaging lens facing the working platform 2; the computer 6 is used to control the actions of the CCD camera 4 and the robot 5; the computer 6 collects image data by the CCD camera 4, and utilizes a calibration algorithm to process the image data, At the same time, the computer 6 calculates the conversion relationship between the user coordinate system, the robot world coordinate system and the camera coordinate system by controlling the movement of the robot 5 between the marked points, and complete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More