

Passive energy-storage ankle joint and foot mechanism for power-assisted exoskeletons of lower limbs
An ankle joint and exoskeleton technology, which is applied to passive exercise equipment, manipulators, program-controlled manipulators, etc., can solve the problem that the performance of tension springs or compression springs is not clear, the boosting effect is not optimal, and the flexibility of the foot mechanism is poor. and other problems, to achieve the effect of coordinated movement trend, compact structure, and reduced weight of the mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The technical solution of the present invention will be described in detail below in combination with the embodiments and the accompanying drawings.
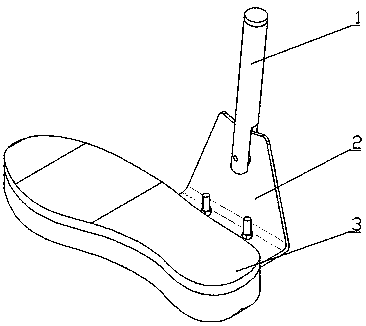
[0031] like figure 1 As shown in the overall structure diagram, a passive energy storage ankle joint mechanism for lower limb power-assisted exoskeleton includes an ankle joint unit 1 , a foot side panel unit 2 and a foot pad unit 3 . The interior of the ankle joint unit 1 realizes one degree of freedom movement in the sagittal plane, and is connected with the foot side panel unit 2; the foot side panel unit 2 is connected with the foot pad unit 3.
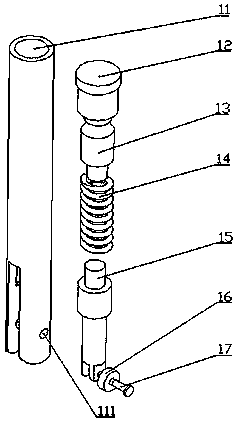
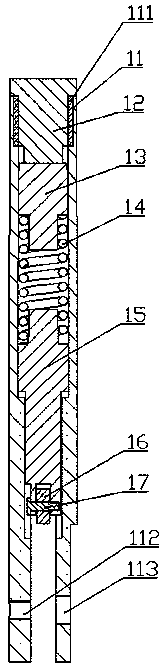
[0032] like figure 2 Ankle unit exploded view and image 3 The front view of the full section of the ankle joint unit, the ankle joint unit 1 includes the calf rod 11, the ankle joint thrust fixing rod 12, the ankle joint thrust rod 13, the compression spring 14, the ankle joint guide rod 15, the pulley 16 and the pulley shaft 17; The internal thread 111 at the upper end ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More