

Adaptive control method for target recycling of space tethered robot after close-range capture
An adaptive control, space tethering technology, applied in adaptive control, general control system, control/adjustment system, etc., can solve the problems of complex controller design and large influence of tether movement, and achieve stable recovery and calculation. precise effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach
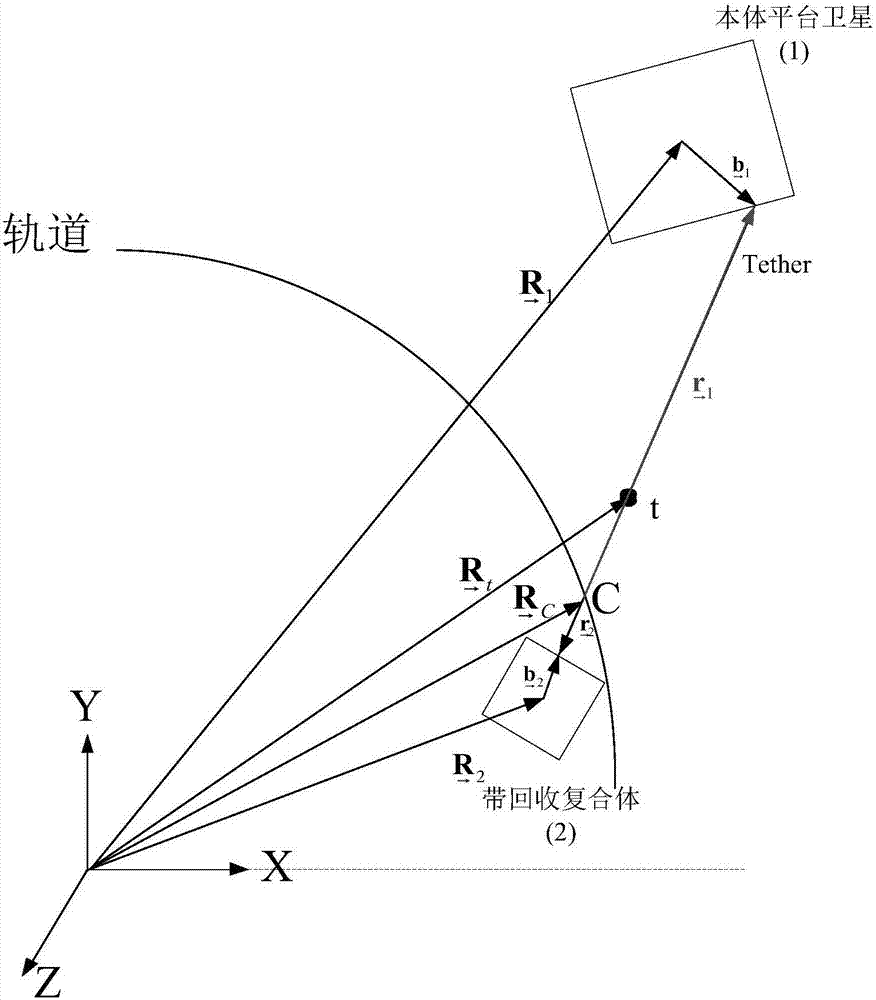
[0075] The first step is to establish a dynamic model of the entire system during the recovery process:
[0076] During the tether recovery complex, the body satellite R 1 , A complex to be recovered composed of satellites and tethered robots R 2 , And the positions of the center of mass of the tether are:
[0077]
[0078] Where b 1 Is the position vector from the centroid of the body satellite to the tether connection point, b 2 Is the position vector from the center of mass of the complex to be recovered to the tether connection point, r 1 Is the position vector from the centroid of the system to the centroid of the body satellite, r 2 Is the position vector from the center of mass of the system to the center of mass of the complex, r t Is the position vector from the center of mass of the system to the center of mass of the tether.
[0079] The horizontal movement of the system can be:
[0080]
[0081] among them with Respectively represent R in formula (1) 1 , R 2 , And R t,i ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More