Three-dimensional gait self-synchronizing and self-stabilizing method based on control strategy
A technology of control strategy and stabilization method, which is applied in attitude control, non-electric variable control, control/regulation system, etc., and can solve problems such as difficult control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] It should be noted that the embodiments in the application and the features in the embodiments can be combined with each other if there is no conflict. The present invention will be further described in detail below with reference to the drawings and specific embodiments.
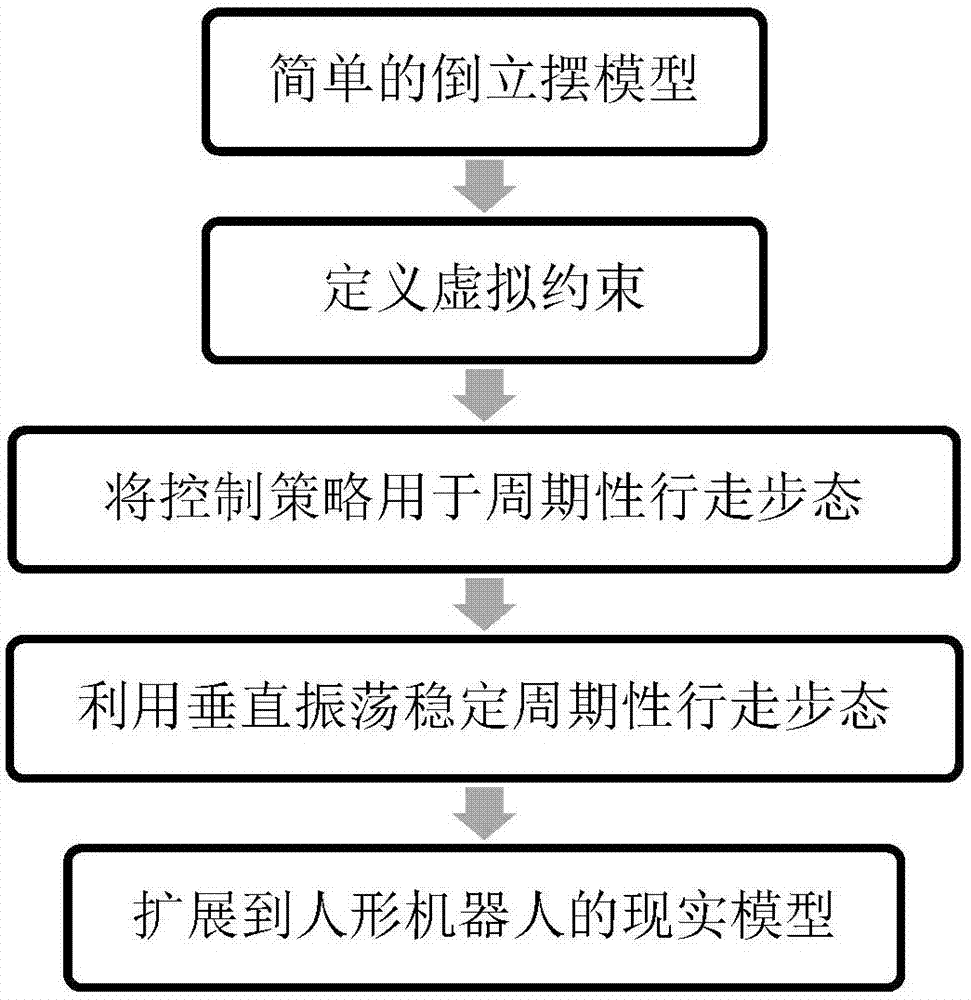
[0058] figure 1 It is a system flowchart of a three-dimensional gait self-synchronization and self-stabilization method based on a control strategy of the present invention. It mainly includes a simple inverted pendulum model, defining virtual constraints, using control strategies for periodic walking gait, using vertical oscillation to stabilize the periodic walking gait, and extending it to the real model of a humanoid robot.
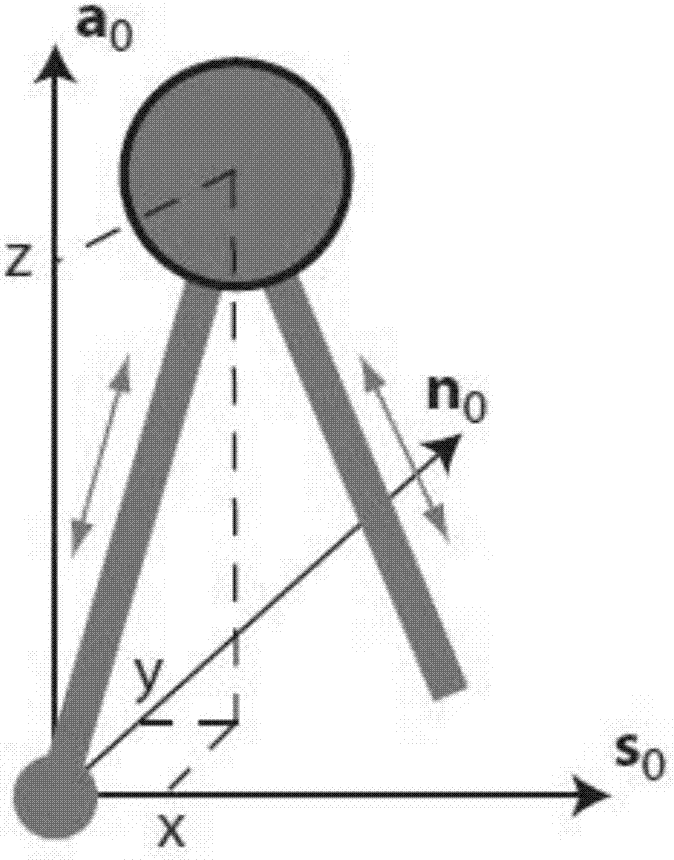
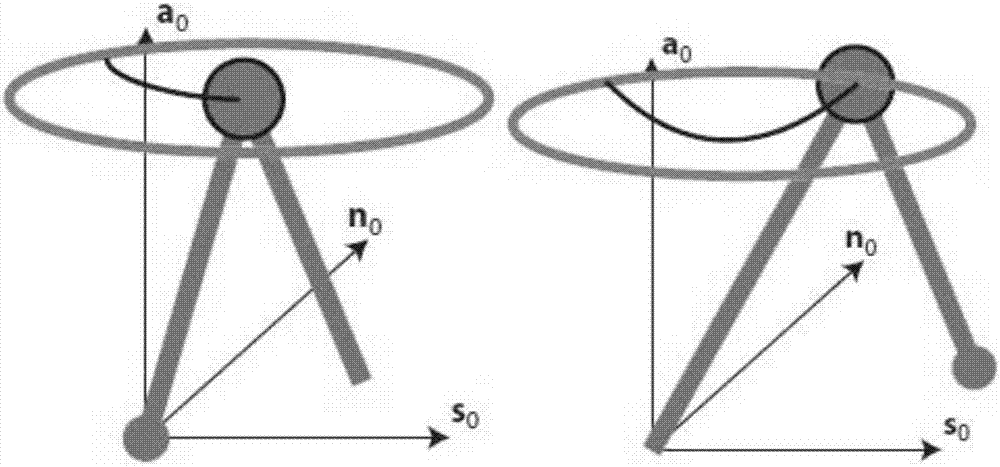
[0059] Define virtual constraints, and define the expected evolution of control variables as a function of the uncontrolled CoM position (X, Y); for planar robots, virtual constraints are usually expressed as a function of a single unexecuted variable; for under-driving with two ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More