Multi-sensor-based vehicle-mounted environment recognition system and omni-directional vision module
An all-round vision and target recognition technology, applied in the field of sensors, can solve the problem of not being able to obtain all-round environmental information in real time, and achieve the effect of improving matching accuracy, improving accuracy, and improving system robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Describe technical scheme of the present invention in detail below in conjunction with accompanying drawing:
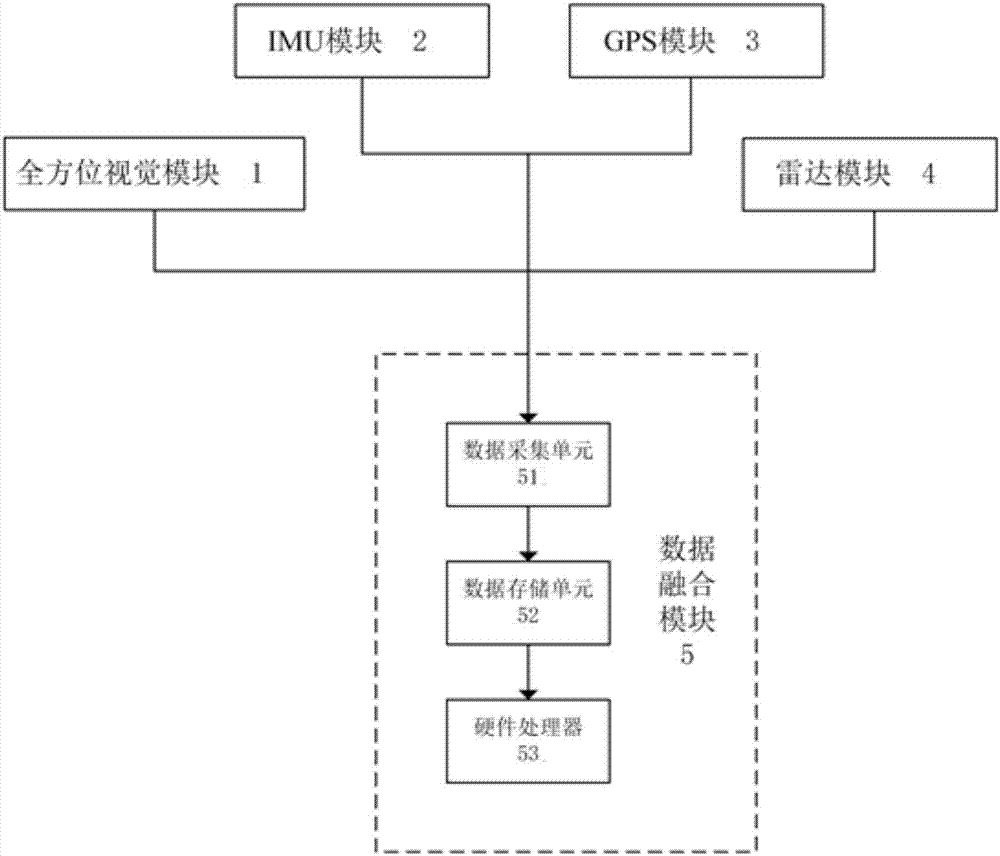
[0029] Such as figure 1 As shown, a vehicle-mounted environment recognition system based on multi-sensors, including omnidirectional vision module 1, IMU module 2, GPS module 3, radar module 4 and data fusion module 5, omnidirectional vision module 1, IMU module 2, GPS module 3. The radar module 4 is respectively connected to the data fusion module 5 through communication. Omni-directional vision module 1 is a multi-camera splicing omni-directional vision device, which can obtain three-dimensional information of the environment within a 360-degree range around the vehicle; IMU module 2 includes accelerometers and gyroscopes, which can obtain vehicle acceleration and angular velocity information; GPS The module 3 and the IMU module 2 work together to obtain the position and attitude information of the vehicle; the radar module 4 can obtain the target position i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More