

AUV (Autonomous Underwater Vehicle) track deviation estimation method based on multi-point terrain matching and positioning
A terrain matching and positioning error technology, applied in navigation calculation tools, navigation, surveying and mapping and navigation, etc., can solve problems such as false points, wrong positioning, and false points not mentioned in positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The following example further describes the main steps of the AUV track deviation estimation method based on multi-point terrain matching positioning:
[0073] Step 1: Multi-point terrain matching positioning
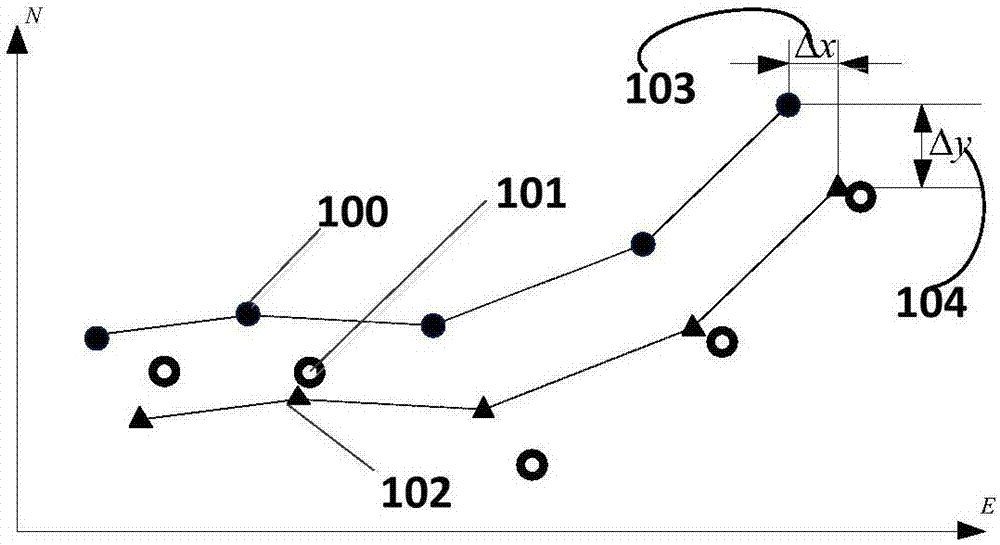
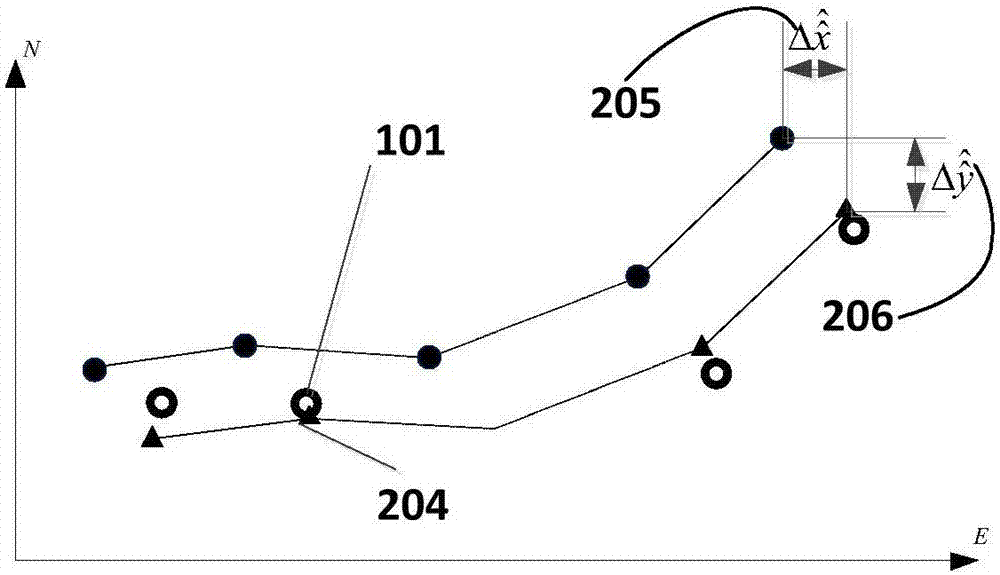
[0074] Assuming that N terrain matching positioning points are planned to correct the track deviation, and the nth terrain matching positioning point is reached at the current moment, the topographic measurement sequence Z of the current terrain matching point n , the dead reckoning position X given by the dead reckoning navigation system n =(x n ,y n ), the dead reckoning error W n =(W xn ,W yn ), the range given by dead reckoning navigation ( image 3 in step 300).
[0075] Z n Indicates the measured terrain of the nth terrain matching anchor point;
[0076] i represents the node index number in the survey terrain;
[0077] k represents the total number of nodes in the survey terrain;
[0078] Indicates the i-th terrain node in the n-th terrain s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More