

Master-slave teleoperation surgical robot control system based on stereoscopic vision
A technology of surgical robot and stereo vision, which is applied in the field of medical surgical robot and human-computer interaction, can solve the problems of lack of stability, real-time performance and high precision, and achieve the effect of high real-time performance and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings; it should be understood that the preferred embodiments are only for illustrating the present invention, rather than limiting the protection scope of the present invention.
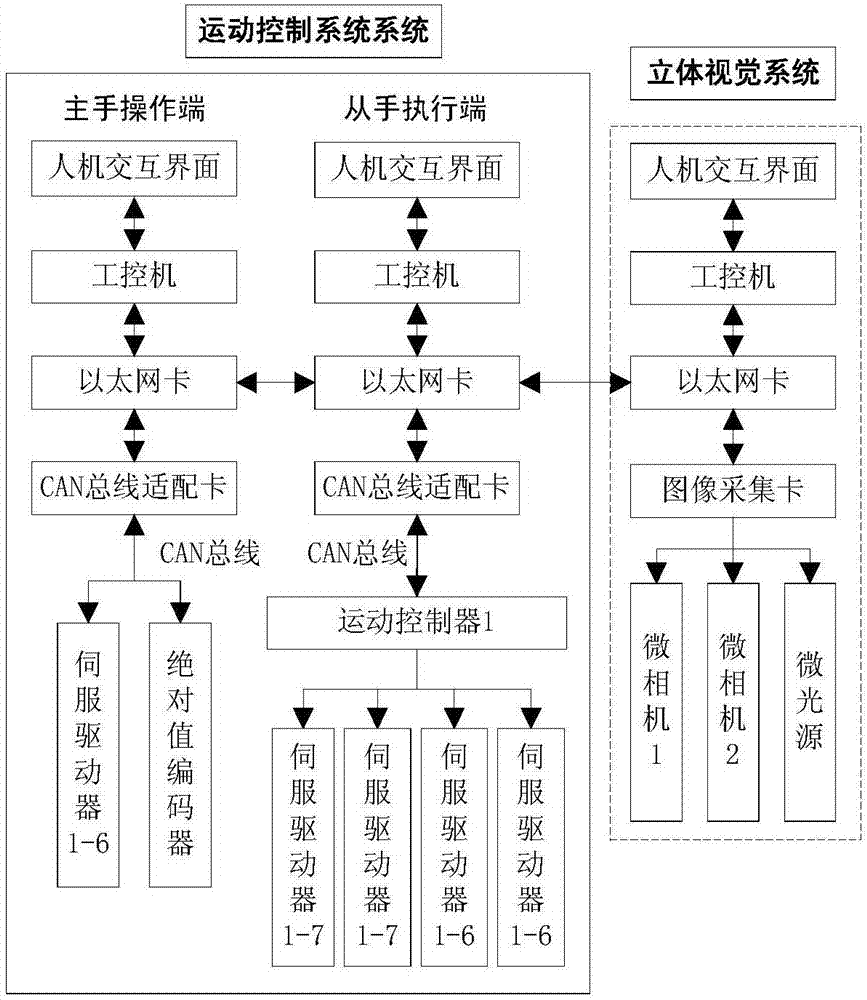
[0025] attached figure 1 It is the hardware architecture of the control system of the present invention, a master-slave remote operation surgical robot control system based on stereo vision, the surgical robot includes a master hand operation end and a slave hand execution end; the master hand operation end is a 7DOF parallel robot, and the slave hand operation end The execution end consists of a 6DOF series mirror arm with a fixed stereo vision system, two 7DOF series instrument arms and a 6DOF auxiliary arm; the master hand operation end communicates with the slave hand execution end through Ethernet, and the robot control system includes a motion control system And t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More