

Three-dimensional positioning device for position calibration of industrial manipulator
An industrial manipulator and three-dimensional positioning technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of high cost of measurement system and cumbersome test methods, and achieve the effect of high motion accuracy, low cost and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
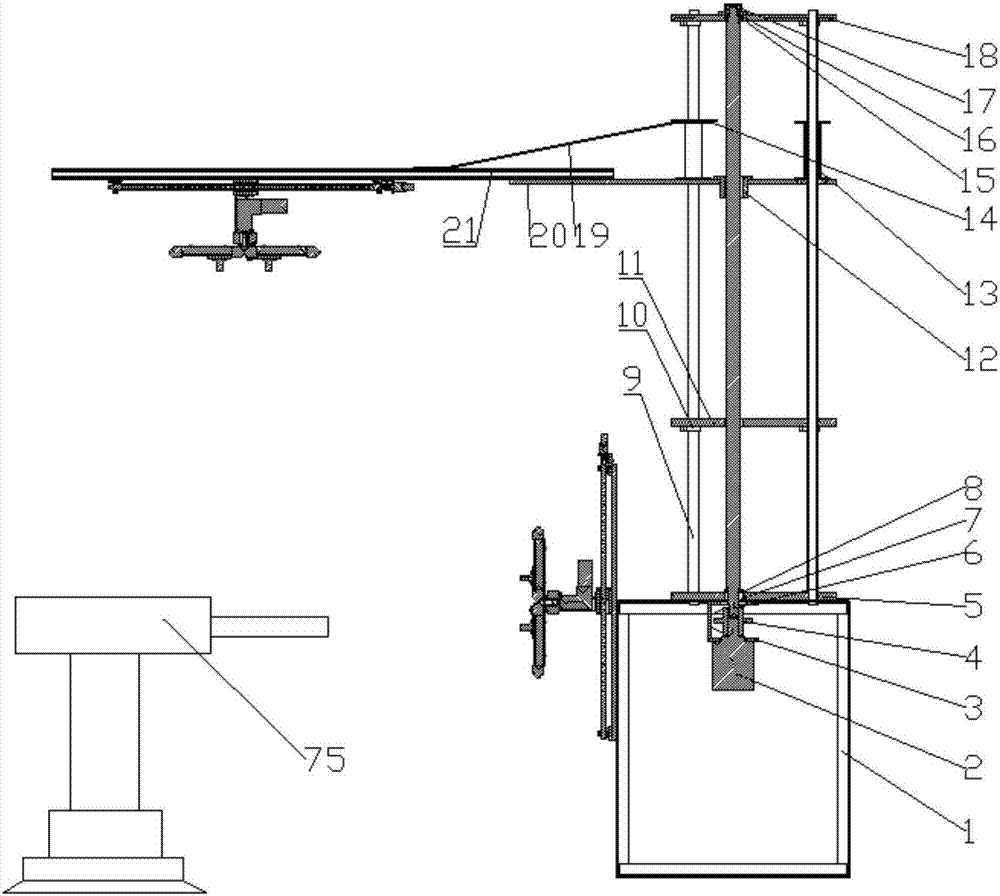
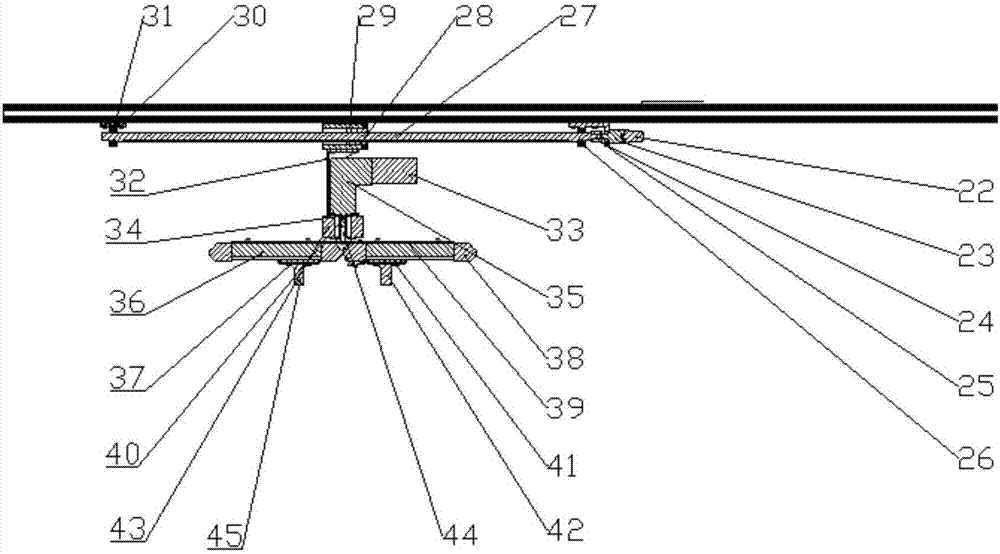
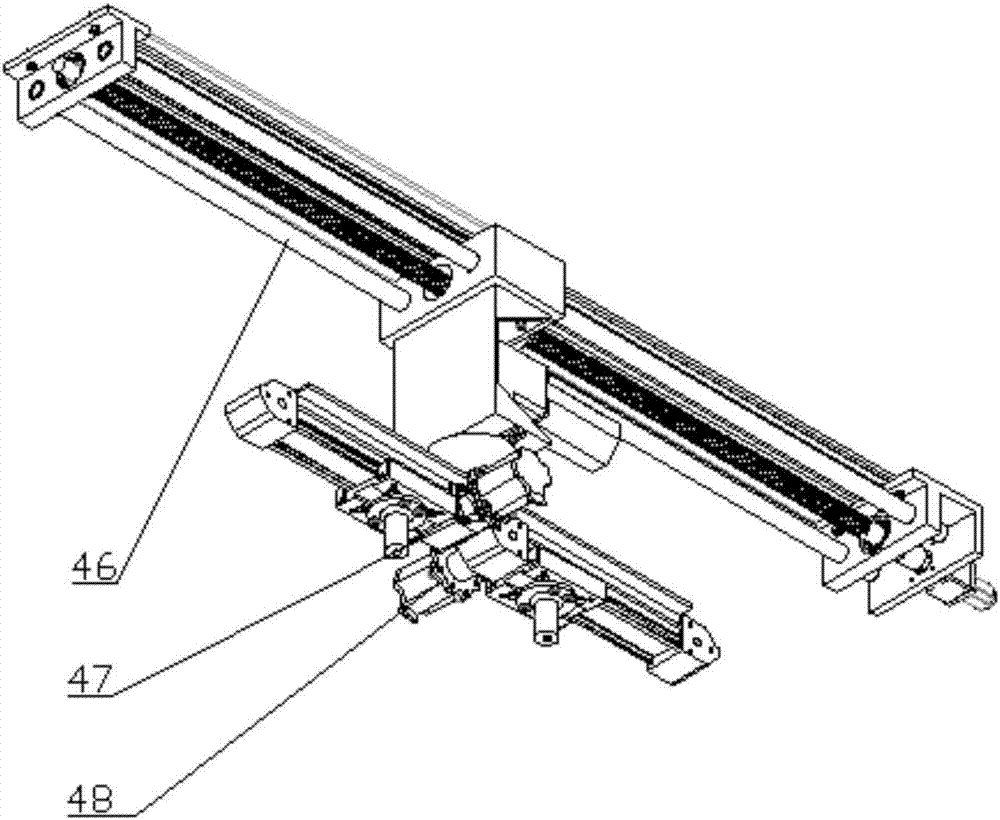
[0032] combine Figure 1 to Figure 5 , a three-dimensional positioning device for manipulator position calibration of the present invention is composed of a column base 1, a column drive motor 2, a column drive motor seat 3, a column motor drive coupling 4, a column base 5, a column guide rod 6, and a column bottom Angular contact roller bearing 7, trapezoidal screw 8, column auxiliary guide rod 9, limit clamp 10, column lower limit base 11, column screw nut 12, column guide rod sliding sleeve 13, reinforced truss 14, column top angle Contact roller bearing 15, trapezoidal screw lock nut 16, column base cover 17, column upper limit base 18, cable-stayed reinforced truss 19, lifting beam 20, aluminum cross arm 21, X-axis motor 22, X-axis deceleration Device 23, X-axis bearing housing a24, X-axis coupling 25, X-axis angular contact bal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More