

A Coaxial Helicopter Control System with Variable Parallelism of Up and Down Rotor Tilters
A control system and tilter technology, which is applied in the field of coaxial helicopter control system, can solve the problems of increased structural weight, increased rotor spacing, and low forward flight speed, so as to reduce the lateral component, improve efficiency, and increase the vertical component Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings.
[0031] The coaxial helicopter control system with variable parallelism of the upper and lower rotor tilters of the present invention comprises three parts: a tilter system, a vertical and horizontal control system, and a heading control system.
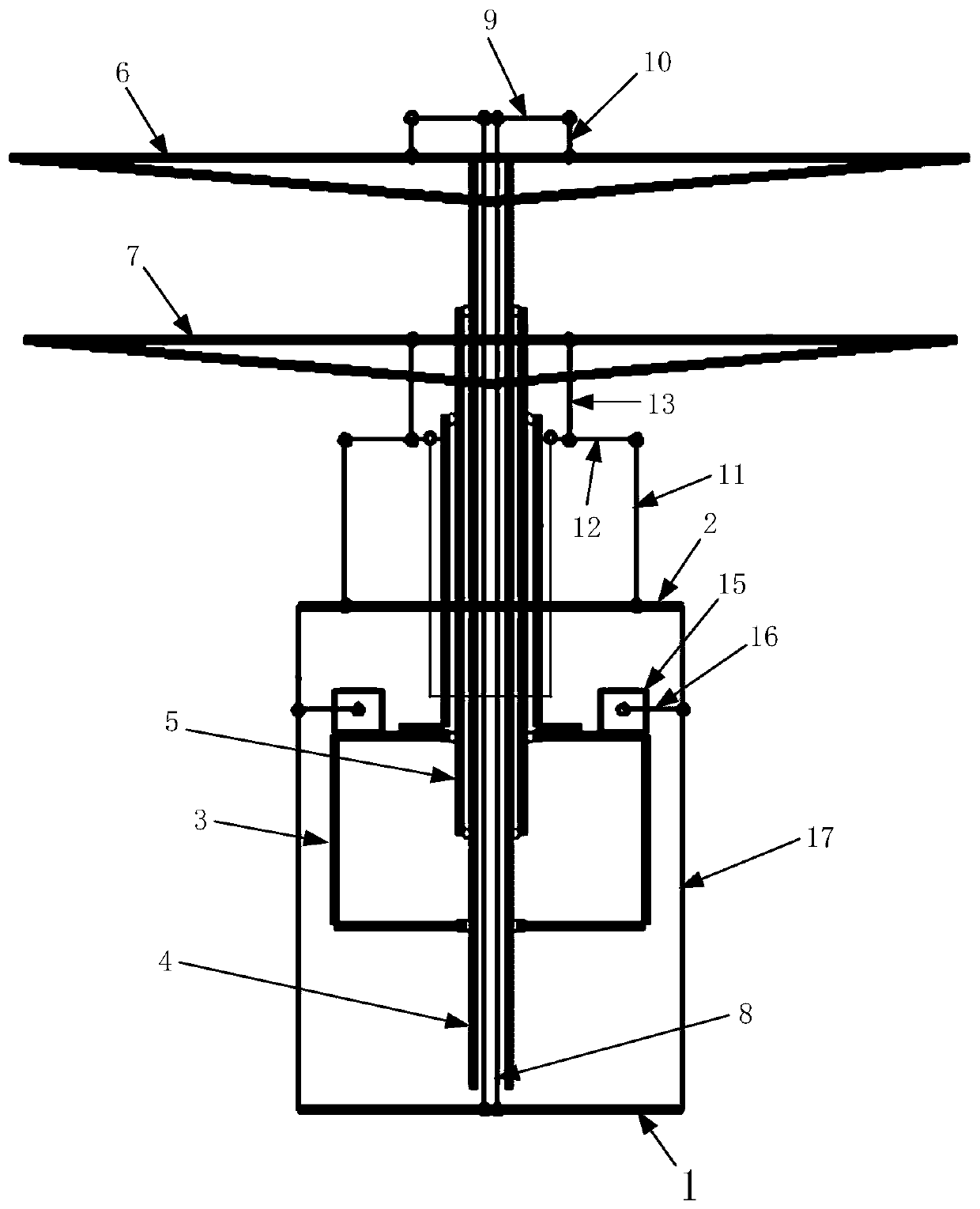
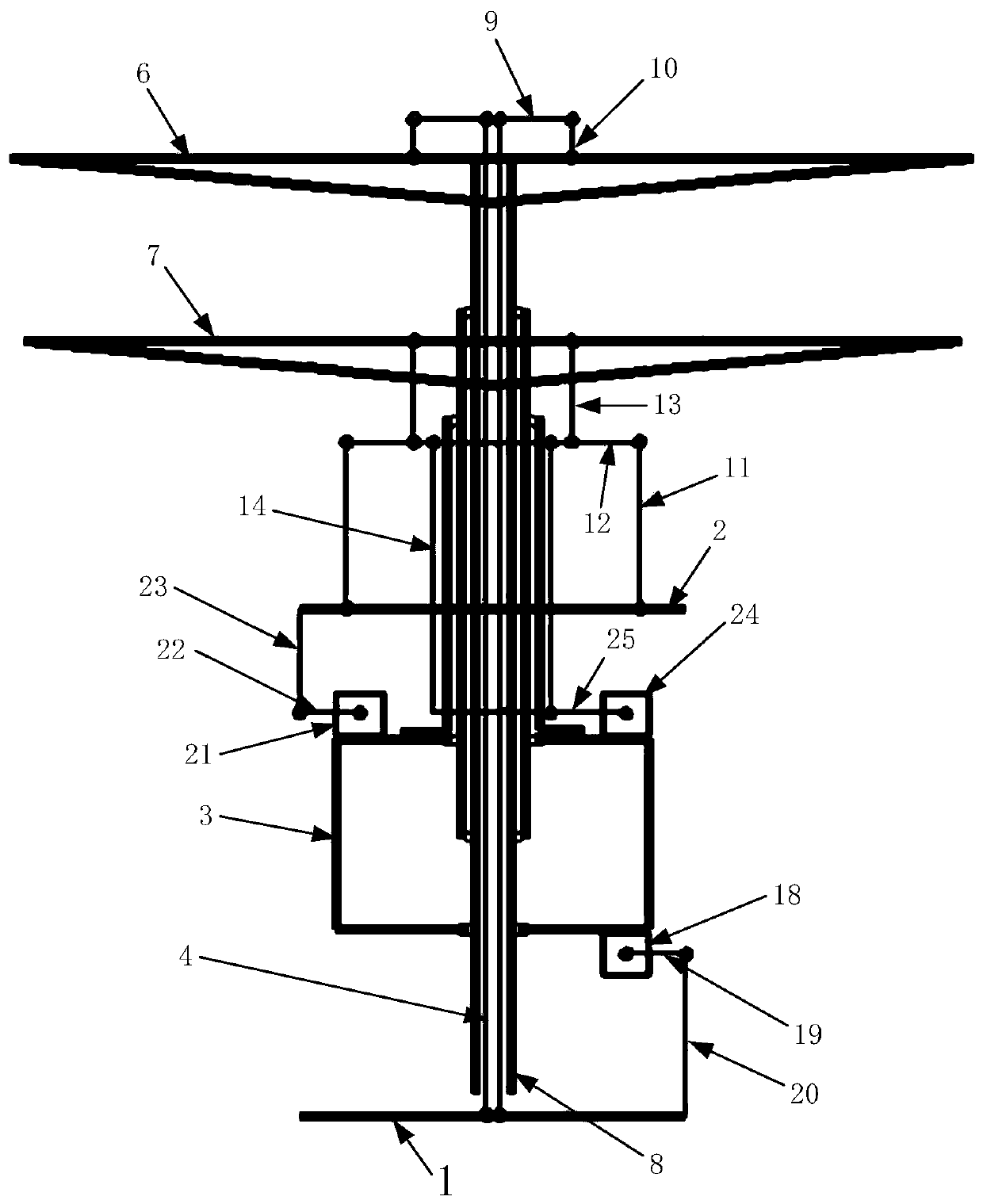
[0032] The tilter system includes two parts, the upper rotor tilter 1 and the lower rotor tilter 2, which are respectively arranged below and above the speed reducer 3 in the helicopter, as figure 2 shown. The speed reducer 3 is an important part of the helicopter. The speed reducer 3 connects the inner shaft 4 and the outer shaft 5 nested inside and outside the aircraft rotor system through internal gears, and the inner shaft 4 and the outer shaft 5 are connected with the bearings between the housings of the speed reducer 3. Furthermore, after the high speed output of the engine is reduced to the working speed of the upper ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More