

Six-dimensional force sensor
A six-dimensional force sensor and sensor technology, applied in instruments, measuring force components, measuring fluid pressure, etc., can solve problems such as high coupling degree of component force, high precision requirements of parts, and small Z-direction bearing load, etc., to achieve inter-dimensional The effect of low coupling degree, low precision requirement and low processing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The technical solution of the present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings.
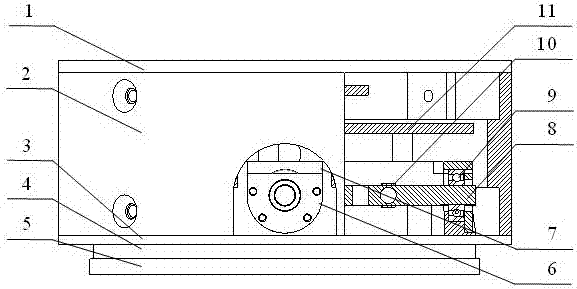
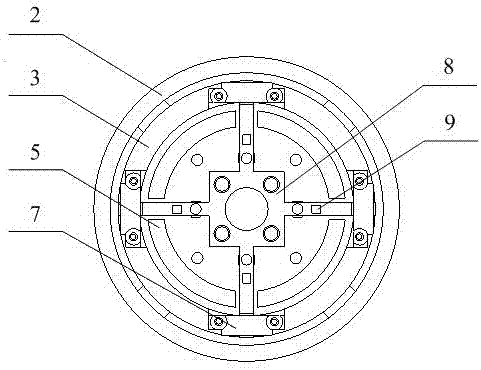
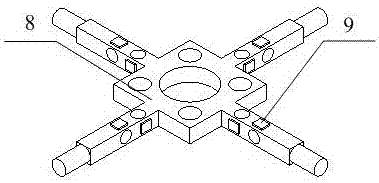
[0031] Such as figure 1 and figure 2 As shown, a six-dimensional force sensor with overload protection of the present invention includes an upper end cover 1, a housing 2, a sensor base 3, a rubber sealing ring 4, an overload protection mounting plate 5, a bearing end cover 6, and a bearing block 7 , elastic body 8, bearing 9, strain gauge 10, acquisition circuit board 11. Among them, the elastic body 8 is used to measure the three component forces F in the space coordinate system x , F y , F z and three moments M x ,M y ,M z . The upper end cover 1 and the sensor base 3 are parallel to each other and fixedly connected to two ends of the shell 2 respectively. The bearing end cover 6 and the bearing block 7 are fixedly connected to the sensor base 3 by bolts respectively, and the bearing 9 is fixed on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More