

Implementation method for workpiece grasping of industrial robot based on visual positioning
An industrial robot and visual positioning technology, applied in the direction of instruments, manipulators, manufacturing tools, etc., can solve the problems of unfavorable robot control system integration and reliability, low efficiency, poor accuracy, etc., to improve grasping efficiency, improve identification accuracy, Avoid ungraspable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
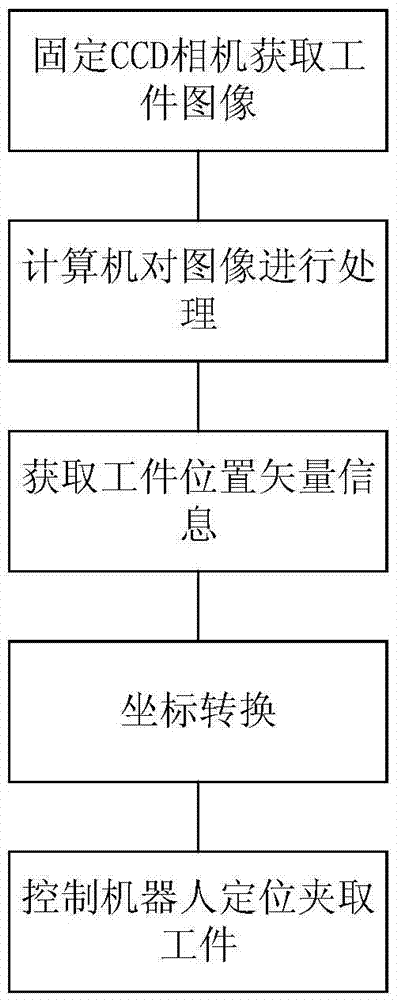
[0078] Such as figure 1 As shown, the industrial robot workpiece grasping realization method based on vision positioning of the present invention comprises the following steps:
[0079] 1. Through the fixed global CCD camera, the workpiece image is collected, and the workpiece image information is transmitted to the robot control system through the Ethernet interface.
[0080] 2. The robot control system processes the image of the workpiece to obtain the position vector information of the workpiece.
[0081] 3. According to the position vector information of the workpiece, the robot performs Cartesian and joint coordinate transformation to realize the positioning and gripping of the workpiece by the end gripper.
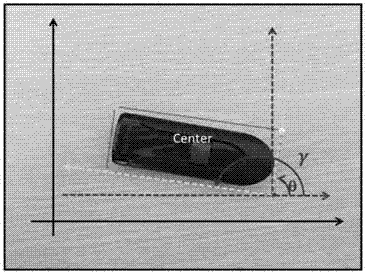
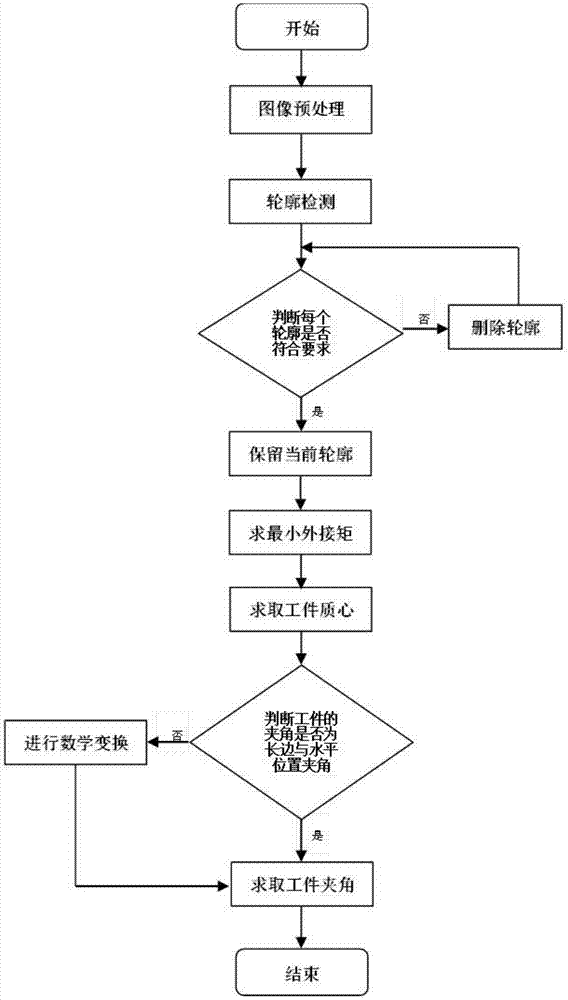
[0082] Such as figure 2 As shown, the process of workpiece image processing and workpiece position vector calculation is as fol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More