

Mechanical arm control system based on variable-stiffness elastic driver and control method of mechanical arm control system
A control system and drive technology, applied in the field of robotics, can solve problems such as poor versatility, non-linearity of elastic elements, unknown dynamic models of robots and drives, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
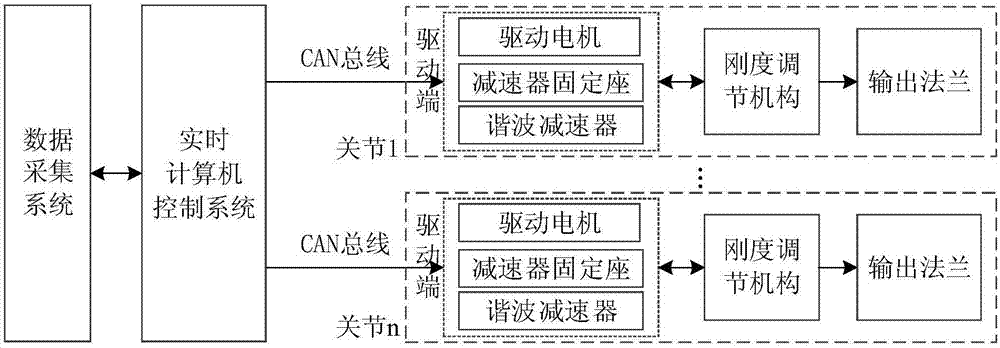
[0065] Such as figure 1 As shown, the mechanical arm control system based on the variable stiffness elastic driver includes a real-time computer control system, a data acquisition system, a driving end, a stiffness adjustment mechanism and an output flange, and is characterized in that: the driving end is used to provide joint active force, The stiffness adjustment mechanism is connected to the driving end for transmitting the active force of the driving end to the output flange, and the stiffness adjustment mechanism realizes the stiffness adjustment of the joint by changing the effective working length of the spring leaf; The drive end shown is connected to the real-time computer control system through the CAN bus analyzer, receives the control quantity generated by the computer in each control cycle, and performs real-time control on the joints to correct the position and attitude of the joints; the output of the data acquisition system The terminal is connected to the real...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More