

A self-propelled chassis of a robot with four-wheel drive on a swing axis
A four-wheel drive, swing shaft technology, applied to motor vehicles, steering mechanisms, non-deflectable wheel steering, etc., to achieve the effect of ensuring safety and stability and enhancing stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The specific embodiments of the present invention will be described in further detail below in conjunction with the drawings and embodiments.
[0056] A four-wheel drive robot self-propelled chassis with a swing axis, used in conjunction with a robot. In the embodiment of the present invention, the self-propelled chassis of a four-wheel drive robot with a rocking axis is used in cooperation with an in-car carriage robot for loading and unloading and stacking bags of materials.
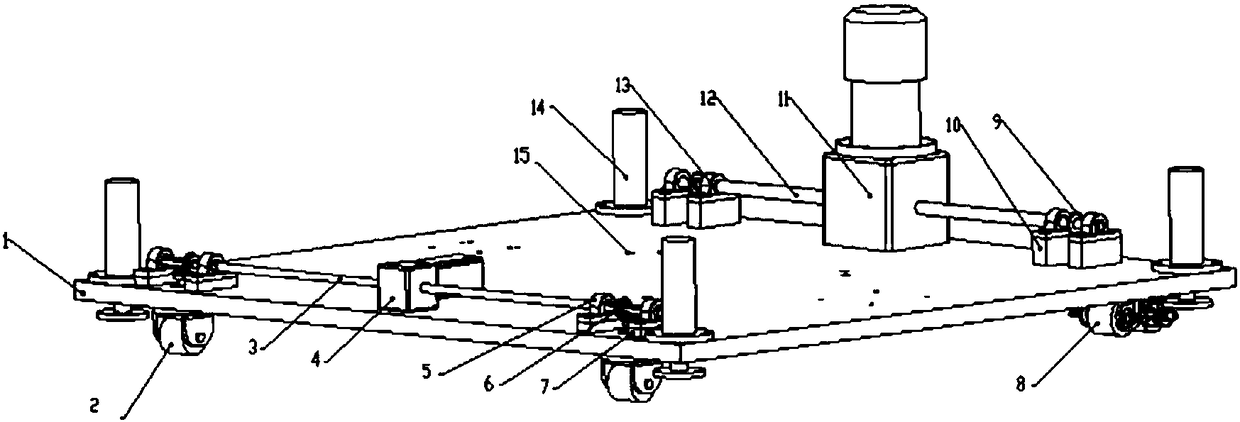
[0057] Such as figure 1 As shown, a four-wheel drive robot self-propelled chassis with a rocking axis includes: a chassis 1, a connecting mechanism 15, a front axle steering system, a rear axle drive system, and a hydraulic lifting system.
[0058] The connecting mechanism 15 is arranged on the chassis 1, and the handling robot is connected to the chassis 1 through the connecting mechanism 15.
[0059] The front axle steering system is arranged in the front of the chassis 1. The front axle steering syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More