

Scene cognition map building and navigation method based on mouse cerebral hippocampal
A technology of cognitive maps and navigation methods, which is applied in navigation, surveying and navigation, navigation computing tools, etc., can solve the problems that map construction methods and navigation research have not set off a research boom, and achieve initiative and adaptability. The effect of low hardware requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
[0051] Implementation scheme of the present invention is:
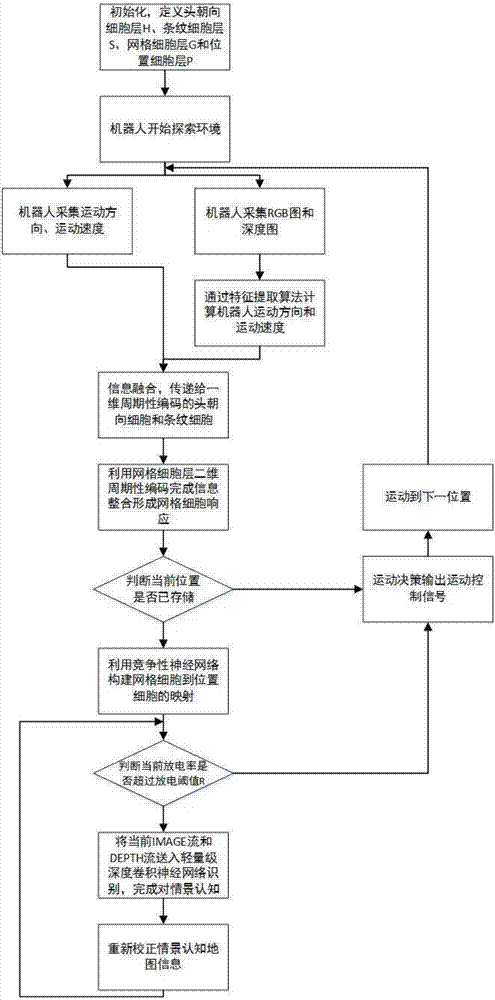
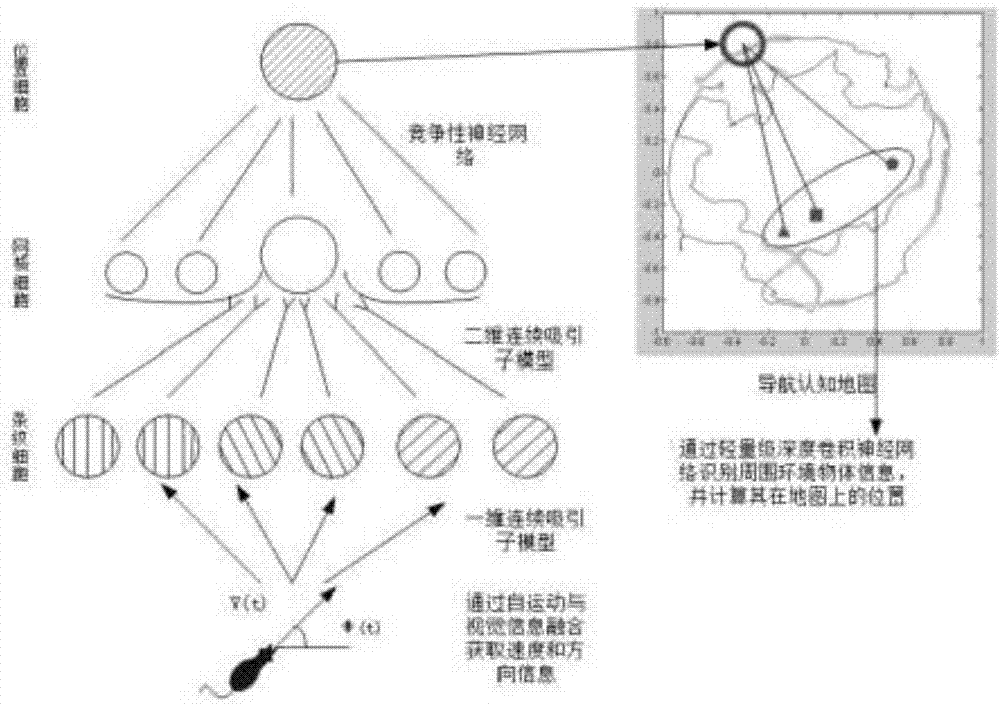
[0052] S1 According to the cognitive model of the hippocampal structure of the mouse brain, the robot CPU will initialize the head-facing cell layer H, the striae cell layer S, the grid cell layer G, and the place cell layer P. Each grid cell unit has different properties, that is, the spacing , orientation, phase, each position cell is formed after grid cell competition, which represents different position information. Different place cells correspond to different spatial positions. At the same time, the robot will initialize the RGB image input and depth image input of the external heterogeneous information input source depth camera, which are the IMAGE stream and the DEPTH stream respectively;
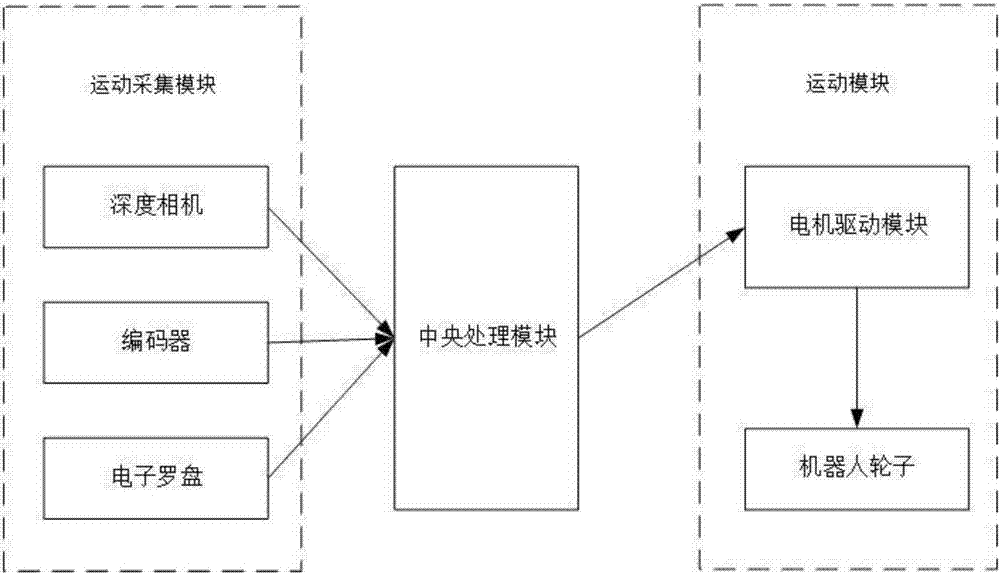
[0053] S2 The robot explores the environment, and the robot uses the motion acquisition device to col...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More