

Pan-tilt attitude detection method and device
A detection method and detection device technology, applied in the field of unmanned aerial vehicles, can solve problems such as quaternion without rotation matrix
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
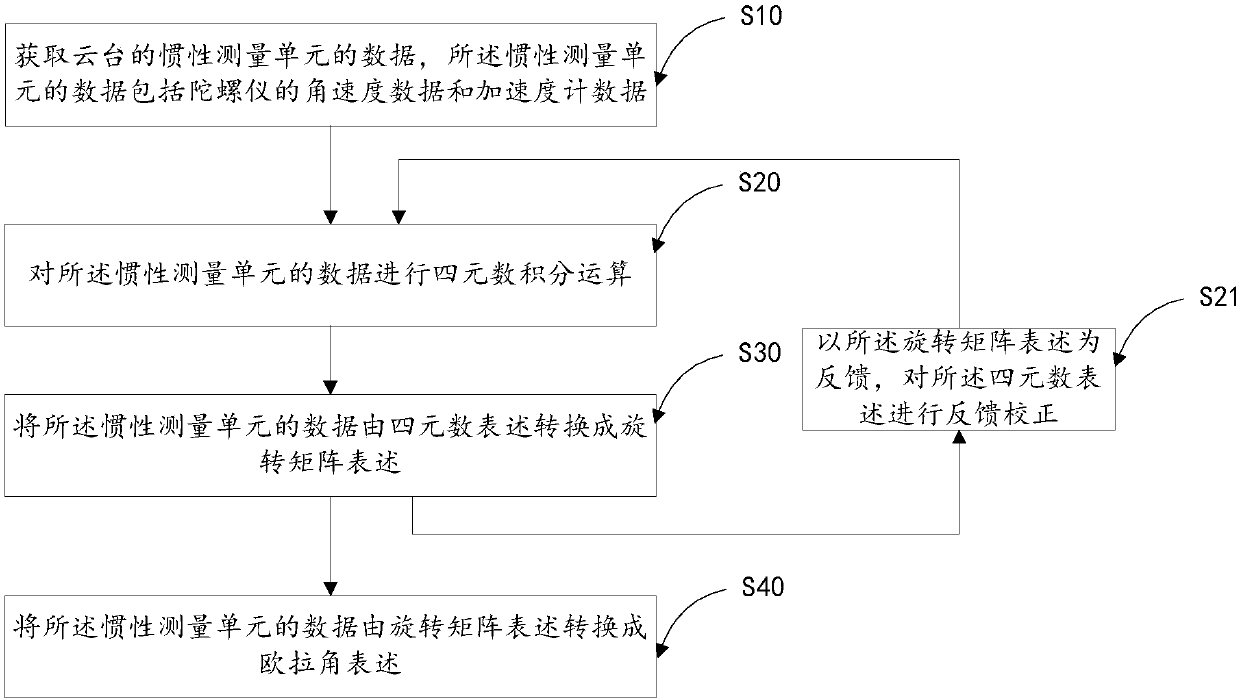
[0052] Such as figure 1 Shown, in the present embodiment, a kind of pan-tilt posture detection method comprises:
[0053] S10, acquiring the data of the inertial measurement unit of the platform, the data of the inertial measurement unit includes the angular velocity data and the accelerometer data of the gyroscope;
[0054] S20, performing quaternion integration operation on the data of the inertial measurement unit;
[0055] S30. Convert the data of the inertial measurement unit from a quaternion representation to a rotation matrix representation;
[0056] S40. Converting the data of the inertial measurement unit from a representation of a rotation matrix to a representation of Euler angles;
[0057] Wherein, the method also includes:
[0058] S21. Using the rotation matrix expression as feedback, perform feedback correction on the quaternion expression.
[0059]In the present embodiment, the pan-tilt attitude data is obtained by the attitude heading system, and the pan-...
Embodiment 2
[0096] Such as Figure 7 Shown, in the present embodiment, a kind of pan-tilt posture detection device comprises:
[0097] Attitude data acquisition module 10, for obtaining the data of the inertial measurement unit of cloud platform, the data of described inertial measurement unit comprises the angular velocity data of gyroscope and accelerometer data;
[0098] A quaternion integration module 20, configured to perform a quaternion integration operation on the data of the inertial measurement unit;
[0099] A rotation matrix module 30, configured to convert the data of the inertial measurement unit from a quaternion representation to a rotation matrix representation;
[0100] The Euler angle module 40 is used to convert the data of the inertial measurement unit from the representation of the rotation matrix into the representation of Euler angles;
[0101] The feedback correction module 50 is configured to use the rotation matrix expression as feedback to perform feedback co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More