

Wearable human gait mimicking lower limb rehabilitation walking aid device
A wearable, lower-limb technology, applied in the direction of equipment to help people move, passive exercise equipment, physical therapy, etc., can solve the problems of lack of flexibility, large impact force, lack of flexibility, etc., to achieve convenient operation and reduce impact. , easy-to-control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
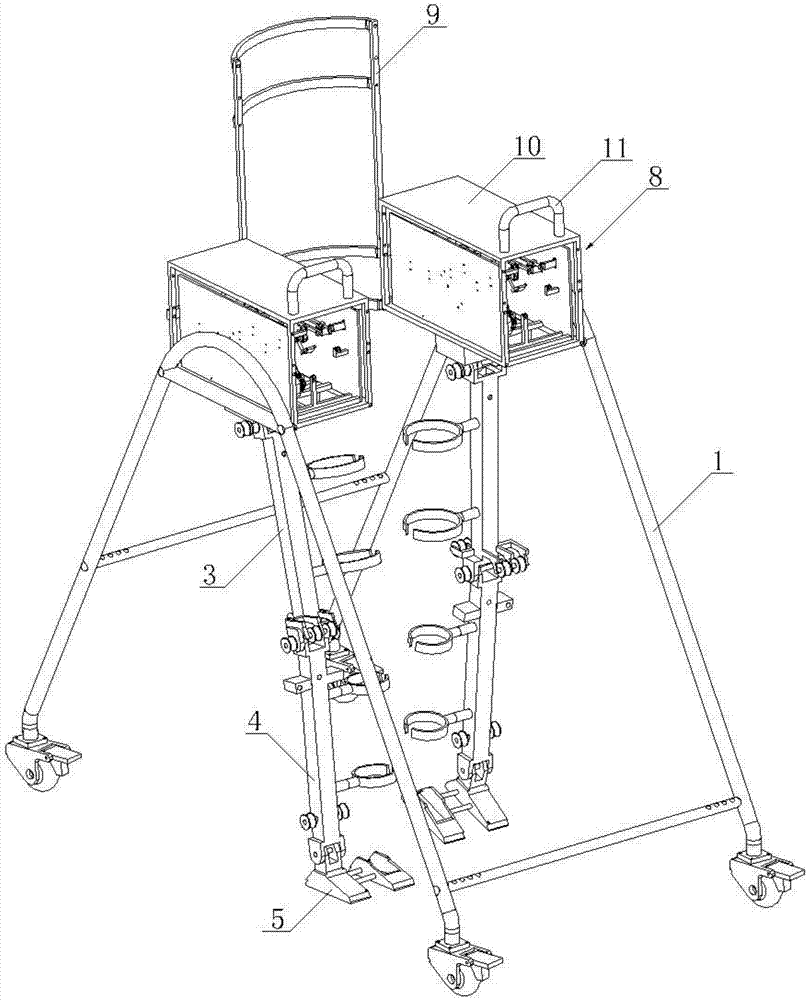
[0041] see figure 1 , the wearable humanoid gait lower limb rehabilitation walking aid device of this embodiment is a support frame composed of a left-right symmetrical trapezoidal bracket 1, and a lower-limb mechanism is arranged symmetrically on the support frame. The lower-limb mechanism includes: a waist 2, which is fixed on its top Drive module 8 is set, and its bottom is hingedly connected with the upper end of thigh bar 3 through horizontal pins to form a hip joint; There is a thigh fixing ring 6 for fixing the thigh; a calf rod 4, the lower end of which is hingedly connected with the foot 5 to form an ankle joint, and a calf fixing ring 7 for fixing the lower leg is provided on the inner side thereof; a driving module 8 is driven by multiple outputs. A plurality of flexible cables, driven by the driving module 8, each flexible cable affects the thigh rod 3, the calf rod 4 and the foot part 5 in a one-to-one manner, so as to realize the movement of the thigh rod 3, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More