

Object pose detection method and device
A detection method and pose technology, applied in the computer field, can solve problems such as time-consuming calculation of key points, high manpower and material resources, and inability to obtain dense sampling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
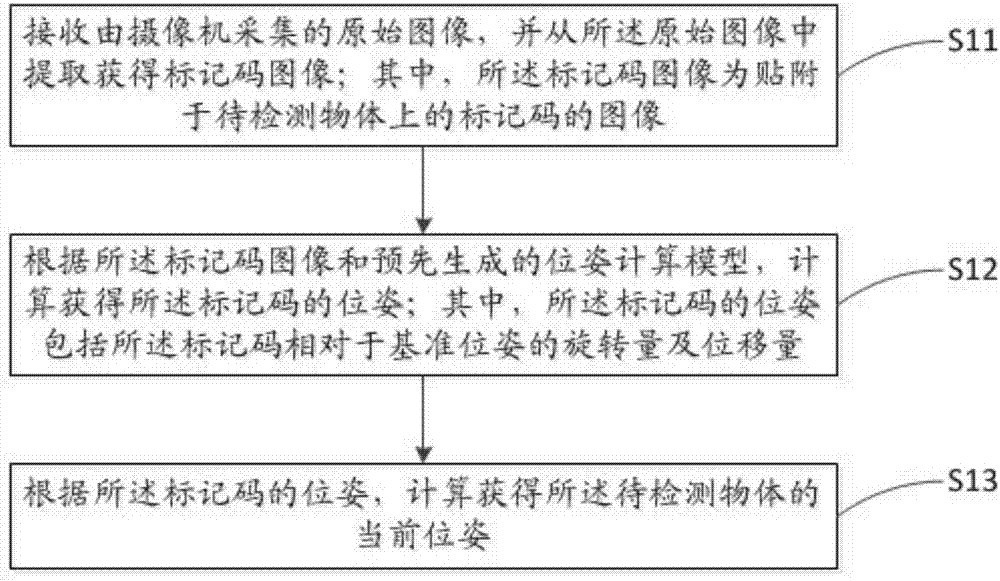
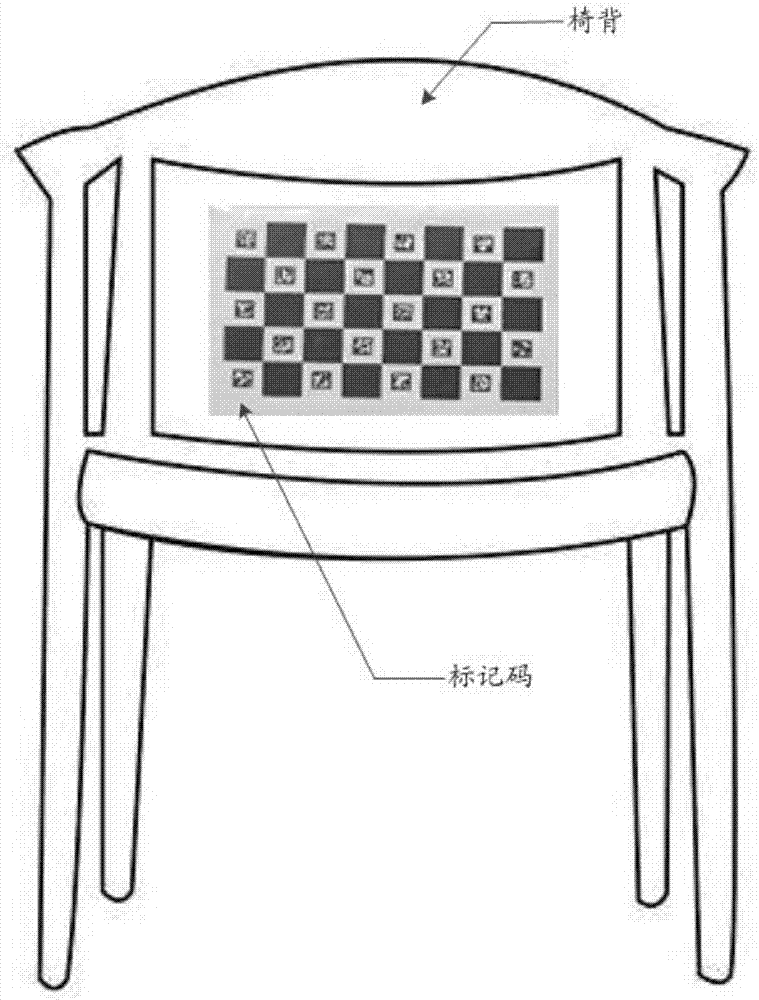
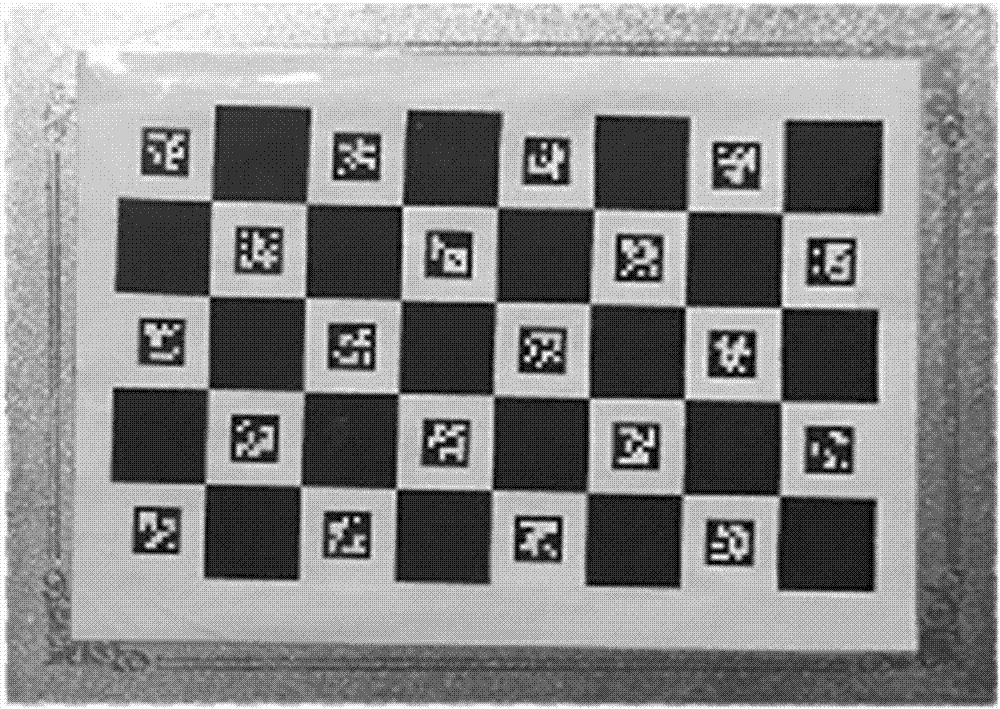
[0082] The present invention obtains the pose of the mark code by analyzing and calculating the image of the mark code attached to the object to be detected collected by the camera, and further calculates the pose of the object to be detected. Because the present invention uses the marking code to mark the pose of the object to be detected, the system only needs to analyze and process the image of the marking code, thereby greatly improving the efficiency of the pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More