

Indoor robot obstacle avoidance method, device and navigation system
An indoor robot and robot technology, applied in navigation, measuring device, mapping and navigation, etc., can solve the problems of difficulty in solving indoor robot obstacle avoidance, high implementation cost, low positioning accuracy, etc., and achieve low-cost and high-precision positioning and obstacle avoidance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
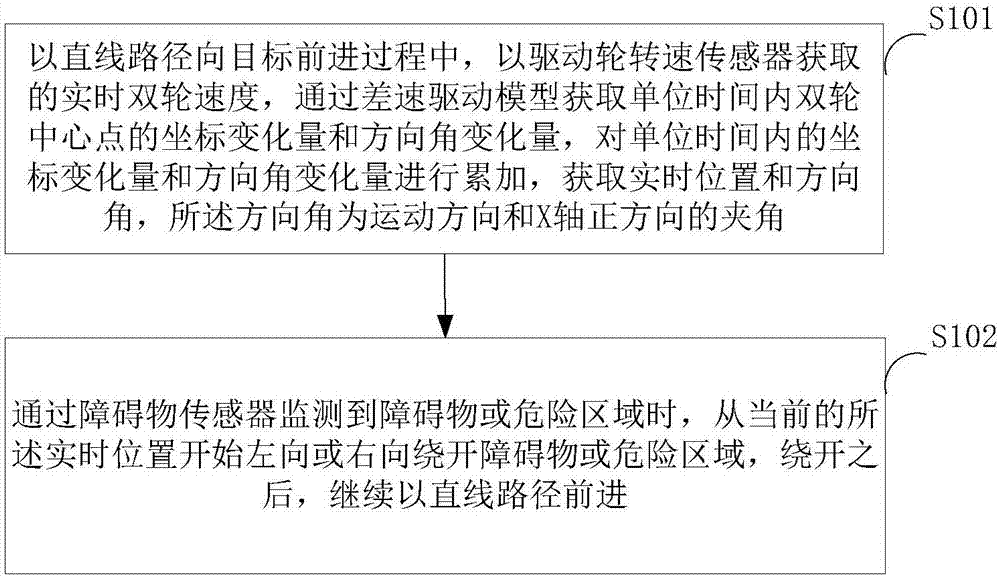
[0075] figure 1 The implementation flow of the indoor robot obstacle avoidance method provided by Embodiment 1 of the present invention is shown, and the details are as follows:
[0076] In step S101, in the process of advancing to the target with a straight path, the real-time two-wheel speed obtained by the driving wheel speed sensor is used to obtain the coordinate change and direction angle change of the center point of the two wheels per unit time through the differential drive model. The coordinate change amount and the direction angle change amount per unit time are accumulated to obtain the real-time position and direction angle, and the direction angle is the angle between the movement direction and the positive direction of the X-axis.
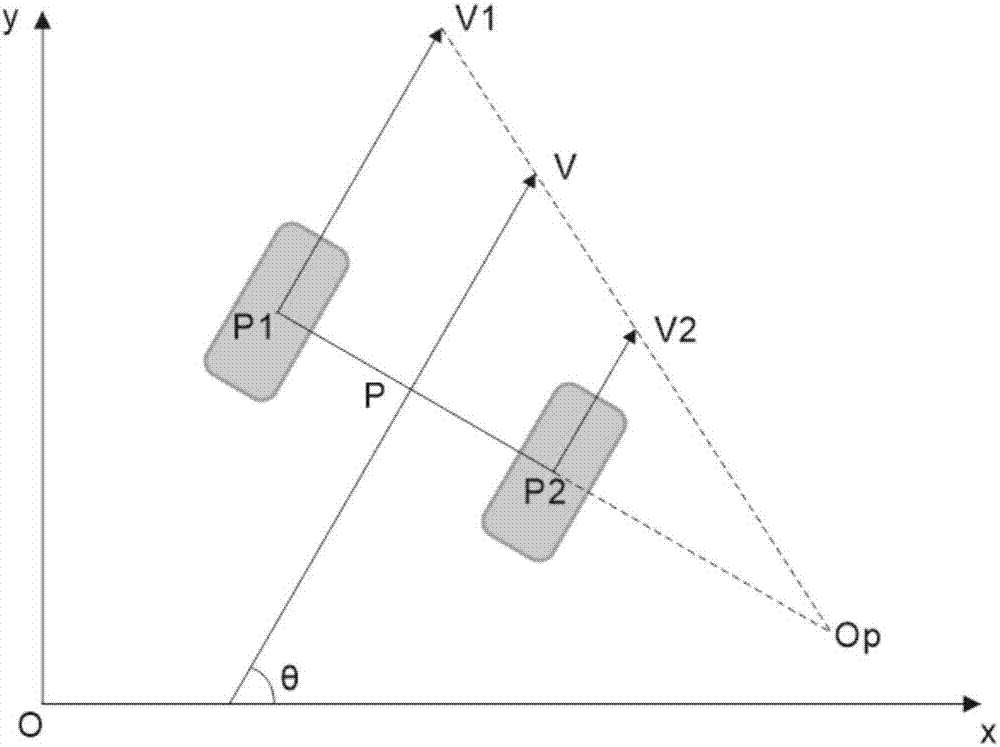
[0077] In this example, if figure 1 As shown, in the differential drive model, the driving wheel speed sensor acquires the speeds of the center points P1 and P2 of the two wheels as V1 and V2, and the midpoint of the two is P, where...
Embodiment 2
[0104] Figure 4 The implementation flow of the indoor robot obstacle avoidance method provided by Embodiment 2 of the present invention is shown, and the details are as follows:
[0105] In step S401, in the process of moving toward the target with a straight path, the real-time two-wheel speed obtained by the driving wheel speed sensor is used to obtain the coordinate change and direction angle change of the two-wheel center point per unit time through the differential drive model, and the The coordinate change amount and the direction angle change amount per unit time are accumulated to obtain the real-time position and direction angle, and the direction angle is the angle between the movement direction and the positive direction of the X-axis.
[0106] In step S402, it is determined whether the non-driving wheel rotates with the two-wheel rotational speed parameter acquired by the auxiliary sensor, and if the non-driving wheel rotates, the coordinate variation and the dire...
Embodiment 3
[0111] Figure 5 A specific structural block diagram of an indoor robot obstacle avoidance device provided by Embodiment 3 of the present invention is shown, and for convenience of description, only parts related to the embodiment of the present invention are shown. In this embodiment, the indoor robot obstacle avoidance device includes: a real-time positioning module 51 and an obstacle avoidance module 52 .
[0112]Among them, the real-time positioning module 51 is used to obtain the real-time two-wheel speed obtained by the driving wheel speed sensor in the process of advancing to the target with a straight line path, and obtain the coordinate variation and direction angle of the two-wheel center point per unit time through the differential drive model The amount of change is to accumulate the amount of coordinate change and the amount of direction angle change per unit time to obtain the real-time position and direction angle, and the direction angle is the angle between th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More