

Grabbing hand movement mechanism
A mobile mechanism and gripper technology, applied in the direction of manipulators, claw arms, chucks, etc., can solve the problems of cumbersome workpiece movement, long time use, and impact on production efficiency, so as to reduce workpiece transfer links, improve production efficiency, and increase grip. The effect of the distance the hand can move
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
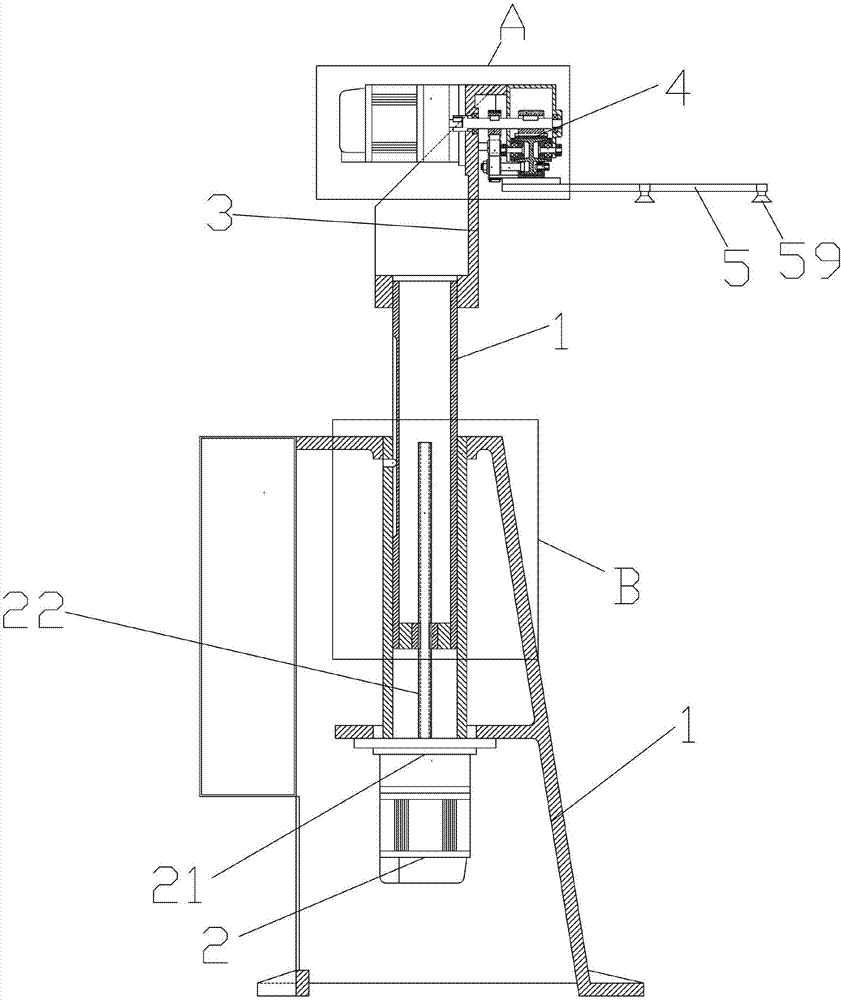
[0032] see Figure 1-Figure 5 , this embodiment shows a small machine two-dimensional manipulator:
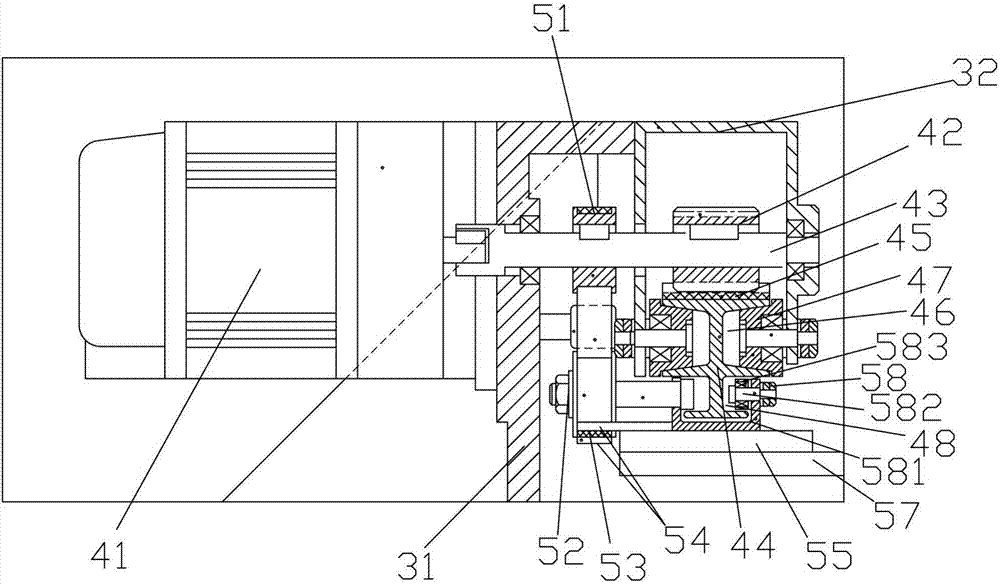
[0033] It includes a base 1, a lifting assembly 2 arranged on the base 1, a moving cross arm fixing frame assembly 3 arranged on the top of the lifting assembly 2, a moving cross arm assembly 4 arranged on the moving cross arm fixing frame assembly 3, and a moving cross arm assembly 4 arranged on the moving The gripper movement assembly 5 on the cross arm assembly 4;
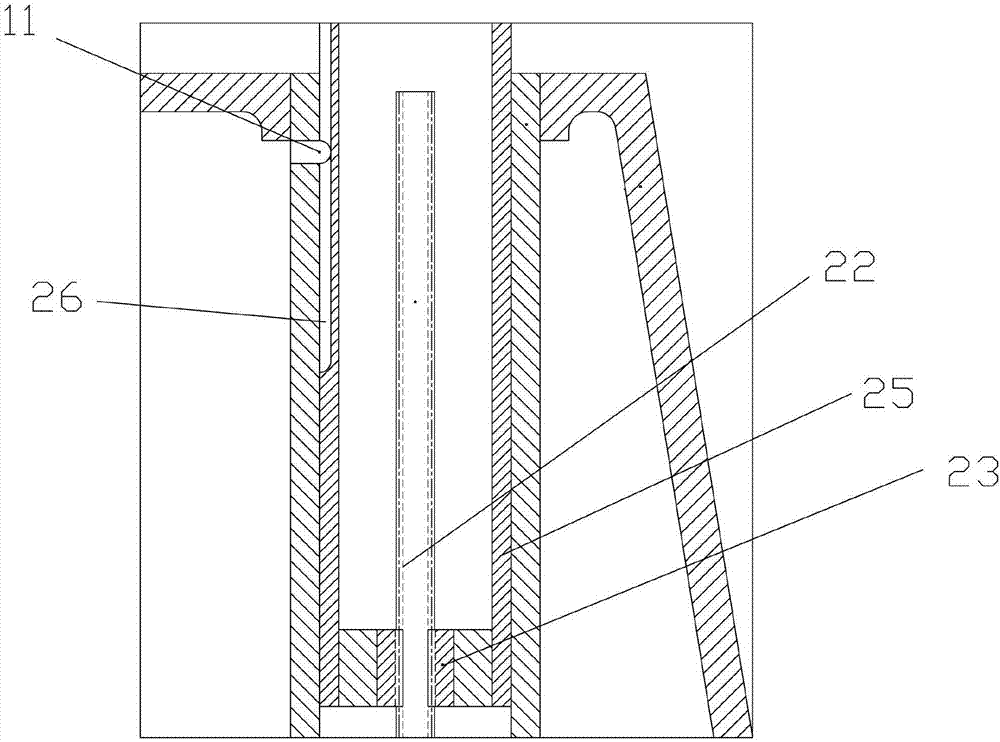
[0034] Lifting assembly 2 comprises the lifting driving device 21 that is made of motor that is arranged on the base 1, is connected to the lifting screw 22 of lifting driving device 21, is arranged on the lifting screw nut 23 on the lifting screw 22, and the lifting screw nut 23 is arranged on Inside the hollow lifting guide rod 24, the moving cross arm fixing frame assembly 3 is arranged on the top of the hollow lifting guide rod 24;
[0035] The base 1 is provided with a lifting bush 25 used in conjunction w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More