

A Method for Automatically Analyzing 3D Point Cloud Registration Errors Based on Stereo Grid
A point cloud registration and automatic analysis technology, applied to the data processing of 3D point cloud, based on the three-dimensional grid to automatically analyze the field of 3D point cloud registration error, it can solve the problem of increasing error corresponding points, lack of universality and comparability and other issues to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0061] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
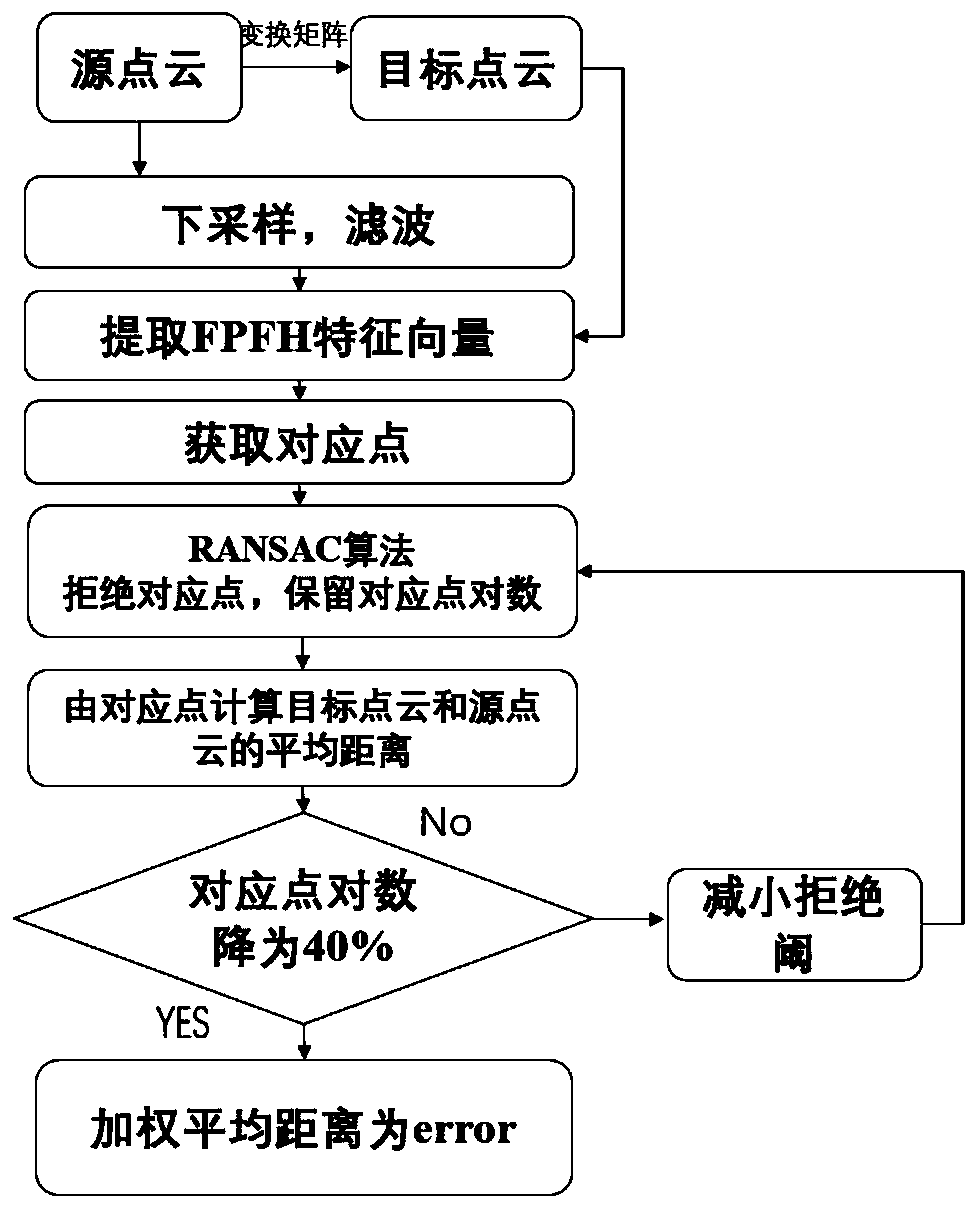
[0062] The present invention is a method for automatically analyzing 3D point cloud registration errors based on a three-dimensional grid, such as figure 1 shown, including the following steps:
[0063] Step 1, obtain the source point cloud through lidar;
[0064] Step 2, obtain the transformation matrix when the registration is completed;
[0065] Step 3, downsampling the source point cloud in step 1;
[0066] Step 4, filtering the source point cloud after downsampling in step 3;
[0067] Step 5, multiply each point in the filtered source point cloud by the transformation matrix to obtain the target point cloud;
[0068] Step 6, calculate the curvature of each point in the source point cloud filtered in step 4 and the target point cloud obtained in step 5, and extract feature points according to the magnitude of the curvature to obtain the sou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More