

A robot variable grid map path planning optimization method and system
A grid map and robot technology, applied in control/regulation systems, instruments, non-electric variable control, etc., can solve the problems of large storage space occupied by maps, slow moving speed of robots, and low efficiency of path planning, etc., and achieve global synthesis The effect of optimal speed, improved search efficiency, and short path distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
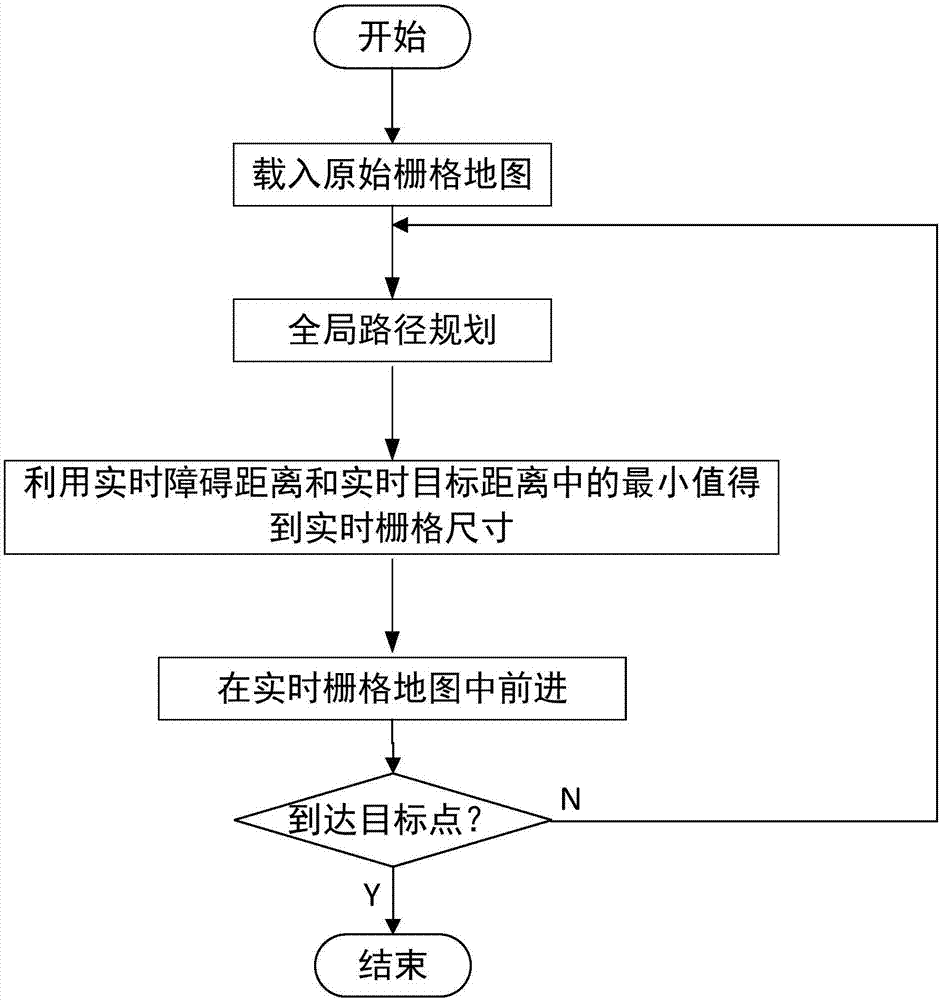
[0039] A robot variable grid map path planning optimization method, comprising:
[0040] (1) Using the original grid map, plan the global path from the initial position of the robot to the target point according to the initial position of the robot, the target point and obstacles;
[0041] (2) When the robot is traveling on the global path, obtain the real-time obstacle distance between the robot and the obstacle, and the real-time target distance between the robot and the target point, and then use the minimum value of the real-time obstacle distance and the real-time target distance to obtain the real-time grid grid size;
[0042] (3) Utilize the real-time grid size to update the original grid map to obtain a real-time grid map, and the robot moves forward in the real-time grid map until it reaches the target point.
[0043] Further, step (2) includes:
[0044] (2-1) Obtain the real-time obstacle distance between the robot and the obstacle, and the real-time target distanc...
Embodiment 2
[0049] A robot variable grid map path planning optimization method, comprising:
[0050] (1) Using the original grid map, plan the global path from the initial position of the robot to the target point according to the initial position of the robot, the target point and obstacles;
[0051] (2) When the robot is traveling on the global path, obtain the real-time obstacle distance between the robot and the obstacle, and the real-time target distance between the robot and the target point, and then use the minimum value of the real-time obstacle distance and the real-time target distance to obtain the real-time grid grid size;
[0052] (3) Utilize the real-time grid size to update the original grid map to obtain a real-time grid map, and the robot moves forward in the real-time grid map until it reaches the target point.
[0053] Further, step (2) includes:
[0054] (2-1) Obtain the real-time obstacle distance between the robot and the obstacle, and the real-time target distanc...
Embodiment 3
[0059] A robot variable grid map path planning optimization method, comprising:
[0060] (1) Using the original grid map, plan the global path from the initial position of the robot to the target point according to the initial position of the robot, the target point and obstacles;
[0061] (2) When the robot is traveling on the global path, obtain the real-time obstacle distance between the robot and the obstacle, and the real-time target distance between the robot and the target point, and then use the minimum value of the real-time obstacle distance and the real-time target distance to obtain the real-time grid grid size;
[0062] (3) Utilize the real-time grid size to update the original grid map to obtain a real-time grid map, and the robot moves forward in the real-time grid map until it reaches the target point.
[0063] Further, step (2) includes:
[0064] (2-1) Obtain the real-time obstacle distance between the robot and the obstacle, and the real-time target distanc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More