

Semantic map construction method based on cloud robot mixed cloud architecture
A semantic map and robot technology, applied in the field of cloud-based robot semantic map construction, can solve problems such as inability to recognize unfamiliar objects, long request response time, and large recognition delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
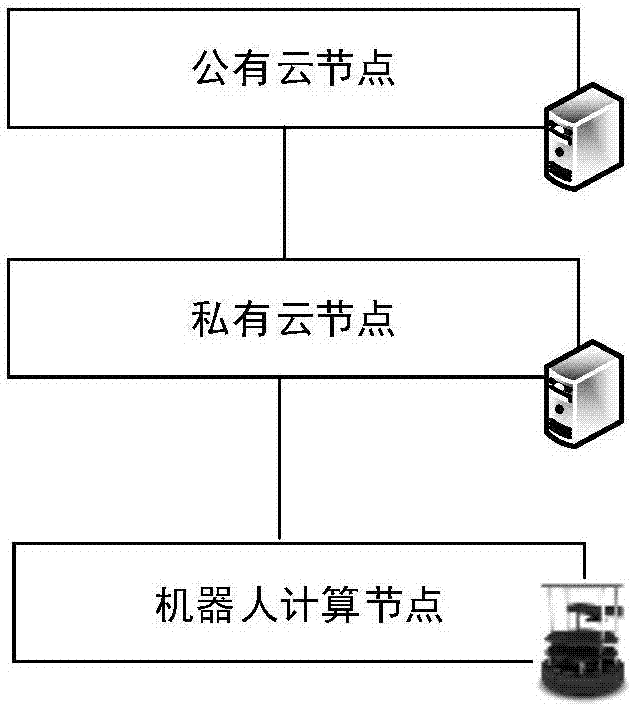
[0090] figure 1 It is the robot hybrid cloud environment constructed in the first step of the present invention, which is composed of robot computing nodes, private cloud nodes and public cloud nodes. Robot computing nodes are robot hardware devices that can run software programs (such as drones, unmanned vehicles, humanoid robots, etc.), private cloud nodes are resource-controllable computing devices with good computing capabilities, and can run computing-intensive or knowledge-based Intensive robotic applications. Public cloud nodes are computing devices with abundant storage resources and the ability to provide external services. Robot computing nodes and private cloud nodes are interconnected through network devices, and private clouds access public clouds through the Internet.
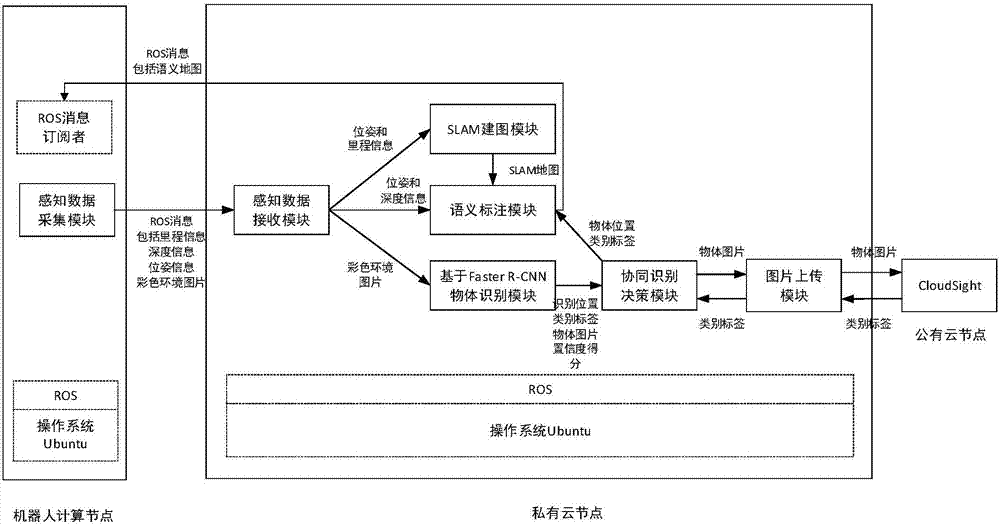
[0091] figure 2 It is a software deployment diagram on the robot computing node and the private cloud node of the present invention. The robot computing node is a robot hardware device that ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More