

Indoor navigation method based on connection of multiple 3D (three dimensional)-structure optical cameras
An indoor navigation and structured light technology, applied in the field of navigation, can solve the problems of high cost, low precision of laser ranging, and too small applicable frequency range and sensitivity of ultrasonic sensor ranging, and achieve the effect of small data error and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
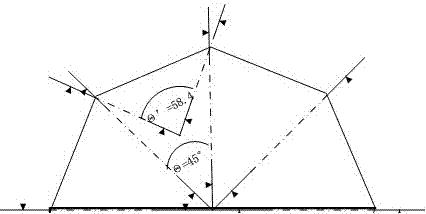
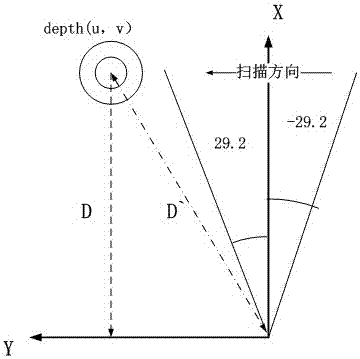
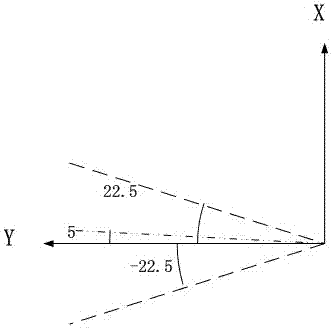
[0015] see Figure 1~4 , in an embodiment of the present invention, an indoor navigation method based on stitching multiple 3D structured light cameras includes the following steps: (1) expressing the map in the form of a grid map, the initial map is set to be empty, and the initial position of the robot is set The pose is the origin of the global coordinate system. In the process of building the map, the odometer data is used to calculate the robot pose predi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More