

Tracking control method of nonlinear pure time delay system independent of ideal track
An ideal trajectory and tracking control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as uncertain time delay and uncertain pure feedback system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
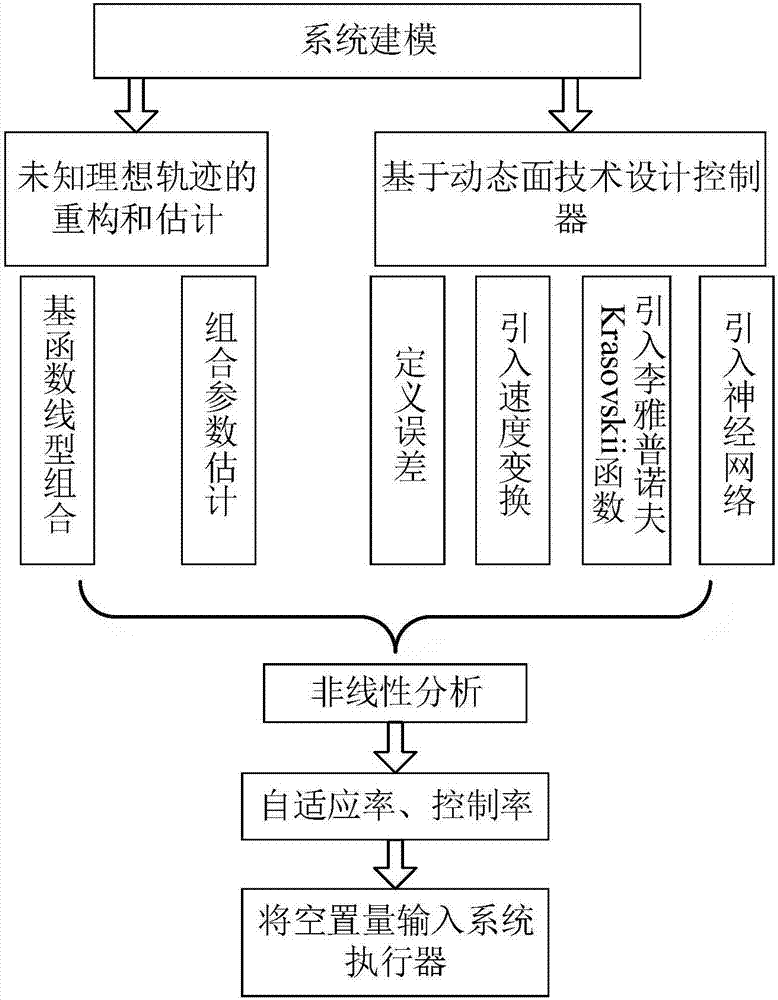
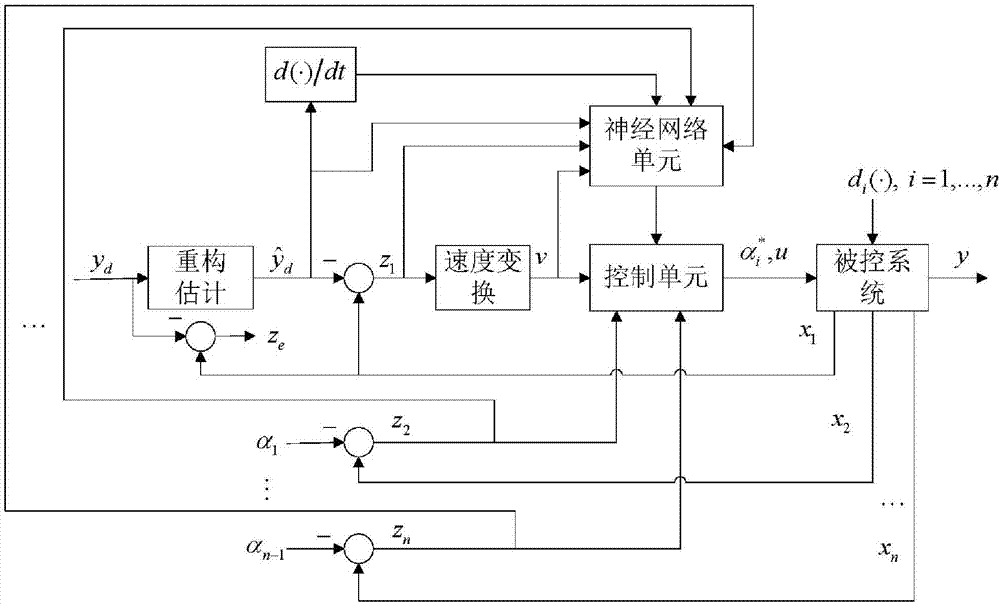
[0073] The present embodiment does not depend on the tracking control method of the nonlinear pure time-delay system of ideal trajectory, comprising the following steps:
[0074] Step 1. Establish the mathematical model of the controlled uncertain pure feedback system with time delay, the form of which is as follows:
[0075]
[0076] where, for i=1,...,n, x i is the system state variable, u∈R, y∈R are the control input and system output of the system respectively, τ i is the uncertain time delay constant, is the state variable affected by the delay, f i ( ) is an unknown but smooth nonlinear function, Δf i (·) is the unknown smooth time delay function, d i ( ) is an uncertain disturbance, x=[x 1 ,...,x n ] T ;
[0077] definition
[0078]
[0079] and have
[0080] Step 2. Using the parameterized linear combination of basis fu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More