

Upper limb exoskeleton with five-degree-of-freedom shoulder structure
A technology of degrees of freedom and exoskeleton, applied in the field of upper extremity exoskeleton, can solve problems such as the complex structure of the upper extremity exoskeleton shoulder, the inability to complete the movement function requirements, and the inability to achieve the degree of freedom movement angle, so as to improve the angle of man-machine cooperation adaptation range, improve the recovery of human body functions, and reduce the effect of mechanism movement resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
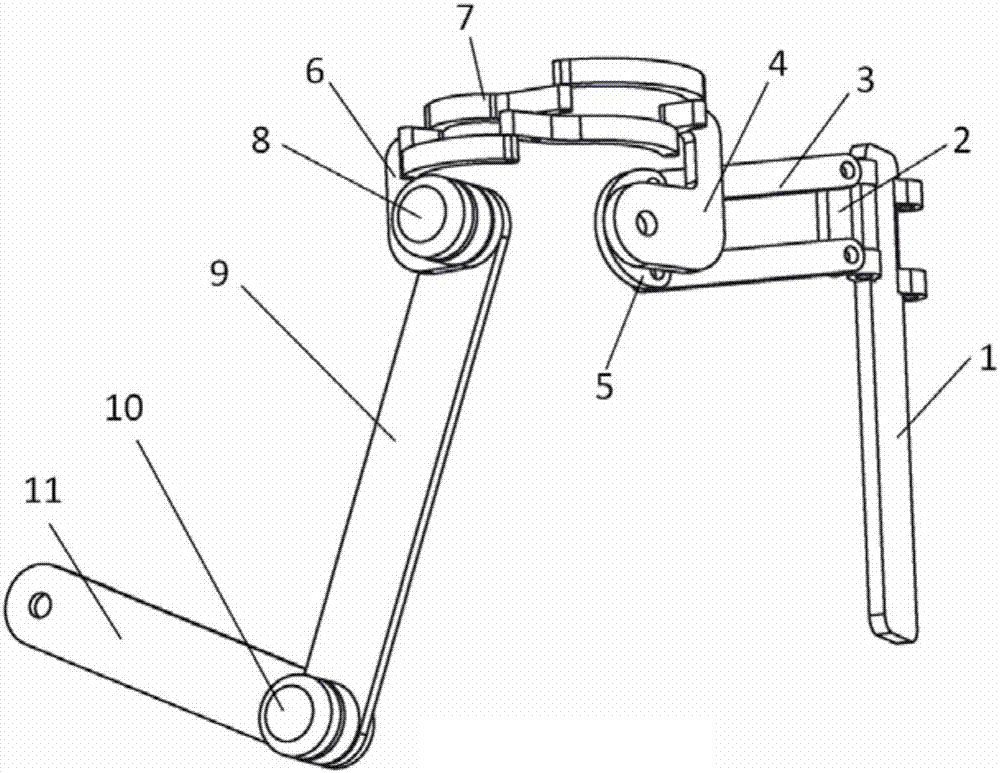
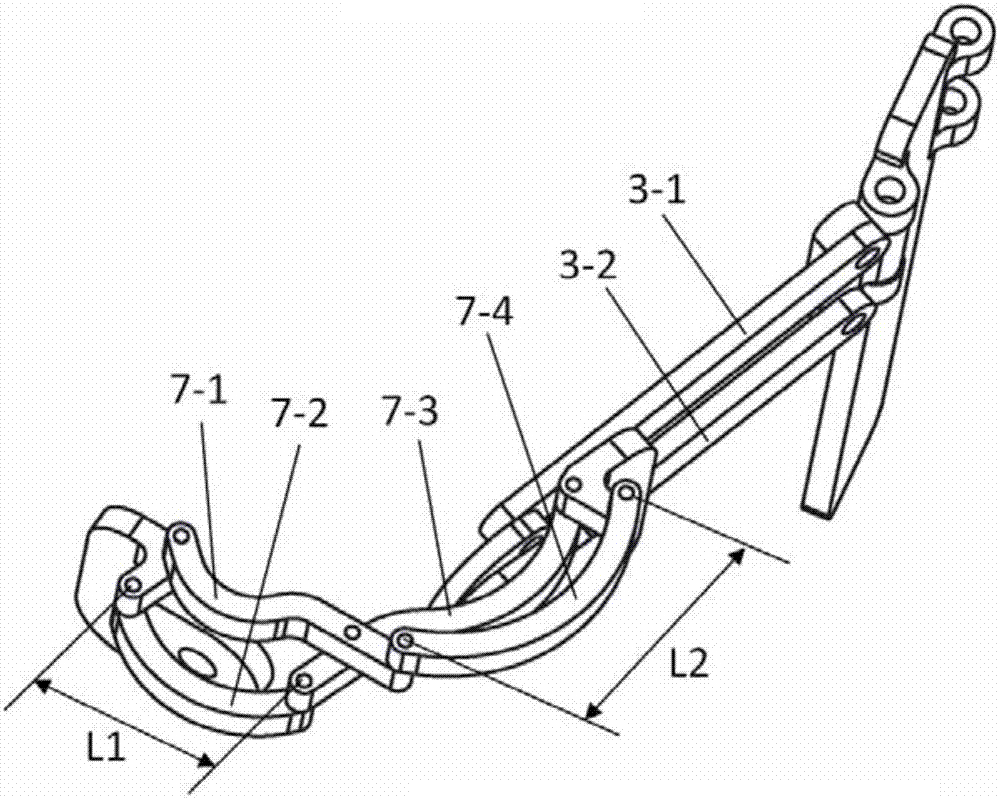
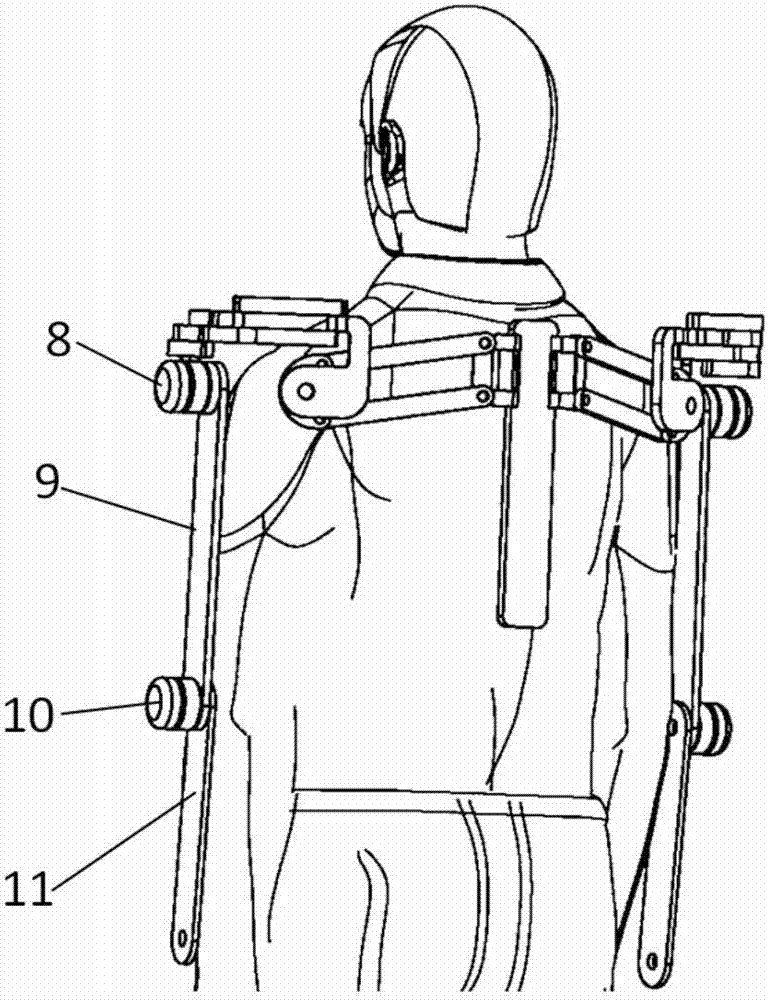
[0032] like figure 1 Shown is the topological schematic diagram of the overall structure of the upper extremity exoskeleton, such as image 3 Shown is a schematic diagram of the overall structure of the upper extremity exoskeleton. It can be seen from the figure that an upper extremity exoskeleton with a five-degree-of-freedom shoulder structure includes a back support frame 1, a clavicle swing back and forth support 2, and a parallelogram clavicle up and down swing mechanism 3 , Shoulder joint left and right swing support 4, shoulder blade support frame 5, shoulder joint front and rear swing support 6, shoulder joint horizontal rotation mechanism 7, big arm back and forth swing drive deceleration motor system 8, big arm structure 9, forearm front and back swing drive deceleration motor system 10 and the forearm structure 11; wherein, the back ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More