

Image-based flying drone object tracking control method
A target tracking and control method technology, applied in the field of target tracking, can solve the problems of small calculation amount, large calculation amount, easy interference of heading information, etc., and achieve the effect of small calculation amount
Inactive Publication Date: 2017-08-29
QINGDAO CAMPUS AVIATION ENG COLLEGE OF THE PEOPLES LIBERATION ARMY NAVY
View PDF2 Cites 29 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
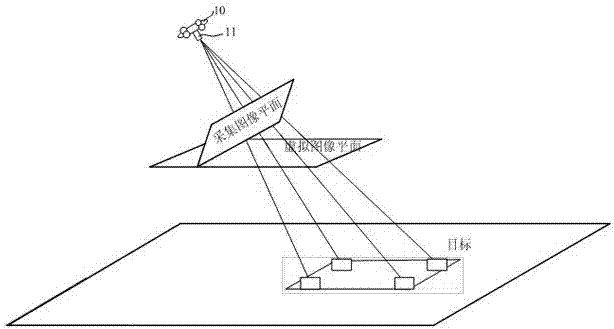
In order to solve the technical problem that the existing unmanned aerial vehicle target tracking control method has a large amount of calculation and the heading information is easily disturbed by the magnetic sensor, an image-based unmanned aerial vehicle target tracking control method is proposed. By establishing a virtual image plane , collect the target image, and use the virtual image plane to perform coordinate transformation on the feature points of the target image, and correct the flight attitude of the UAV by tracking the image feature points, which can also achieve the purpose of target tracking, and this tracking method calculates Small amount, does not depend on the heading information obtained by the magnetic sensor, and can avoid the influence of magnetic interference
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
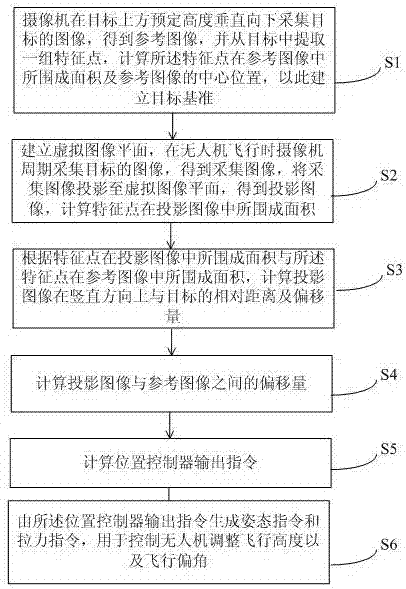
The invention discloses an image-based flying drone object tracking control method, comprising the following steps: 1) photographing downwards the images of an object at a preset height and position; calculating the size of the area enclosed by the characteristic points and the central position of the area to create an object standard; 2) creating a virtual image plane in which during the flight, the camera acquires the image information of the object, obtains the acquired images and projects the acquired images onto the virtual image plane; 3) calculating the offset amounts of the projected images from the vertical direction to the relative distance of the object and from the horizontal direction to the object; 4) calculating the offset amounts of the projected images and the reference images; 5) calculating the position controller outputted instruction; and 6) generating the attitude instruction and the pull-force instruction. The control method of the invention realizes the correction of the flying position of a flying drone through the image characteristic point tracking method, which can track the object with small computations. Without the need of the magnetic compass and other sensor, the influence of electromagnetic interference can be avoided.
Description
Image-based UAV target tracking control method technical field The invention relates to the technical field of target tracking, in particular to an image-based control method for target tracking of an unmanned aerial vehicle. Background technique At present, the UAV target tracking control method needs to calculate the three-dimensional position of the target relative to the UAV through machine vision. This control method has the following disadvantages: 1. The algorithm is complex and the amount of calculation is large; And attitude information, usually the heading information is obtained through the magnetic sensor, but the magnetic heading is extremely susceptible to interference. When tracking a hostile target or approaching a magnetic field such as a high-voltage wire, the magnetic sensor is prone to failure, which will cause the UAV to lose control, resulting in the inability to track the target. Contents of the invention In order to solve the technical problem th...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Applications(China)
IPC IPC(8): G05D1/08G05D1/10G06T7/246G06T7/62
CPCG05D1/0808G05D1/101
Inventor 刘锦涛高丽吴文海辛巧
Owner QINGDAO CAMPUS AVIATION ENG COLLEGE OF THE PEOPLES LIBERATION ARMY NAVY