Operating method and device of mechanical arm
A technology of manipulators and operation instructions, which is applied in the computer field and can solve problems such as inconvenient user operation, insufficient stability of manipulator operation, and insufficient security
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
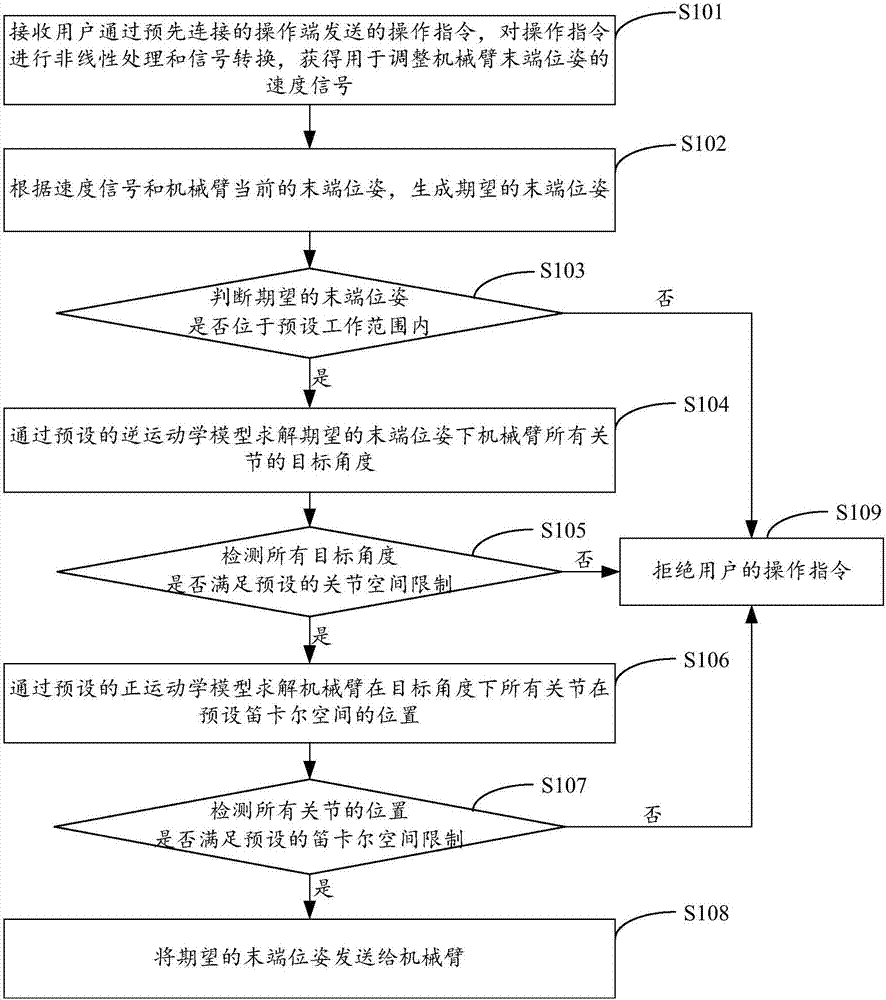
[0024] figure 1 The implementation process of the method for operating the manipulator provided in the first embodiment of the present invention is shown. For the convenience of description, only the parts related to the embodiment of the present invention are shown, and the details are as follows:
[0025] In step S101 , an operation instruction sent by a user through a pre-connected operation terminal is received, and nonlinear processing and signal conversion are performed on the operation instruction to obtain a speed signal for adjusting the pose of the end of the robotic arm.
[0026] The embodiments of the present invention are applicable to an operation platform or system of a robotic arm. In order to avoid the misoperation of the resting platform of the operation end, or the malfunction caused by the linkage of other operation channels when the operation end operates a certain operation channel (each displacement direction controlled by the operation end can correspon...
Embodiment 2
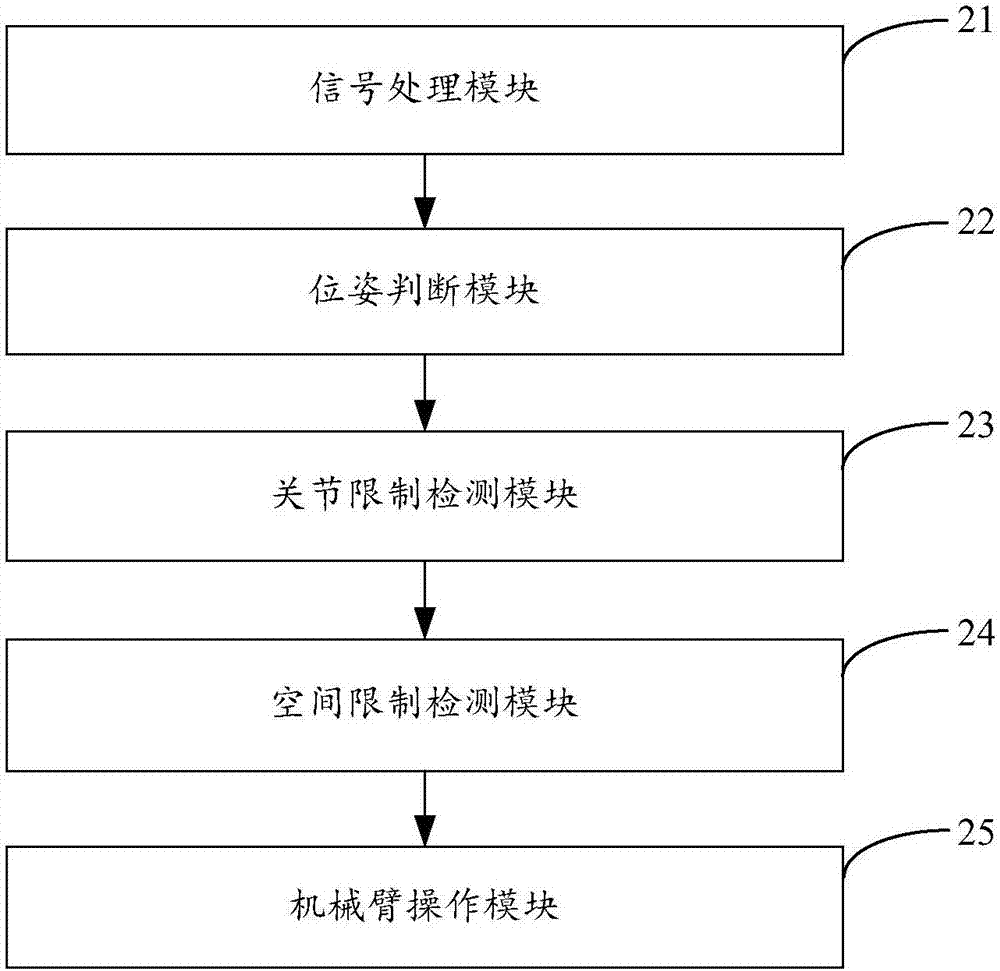
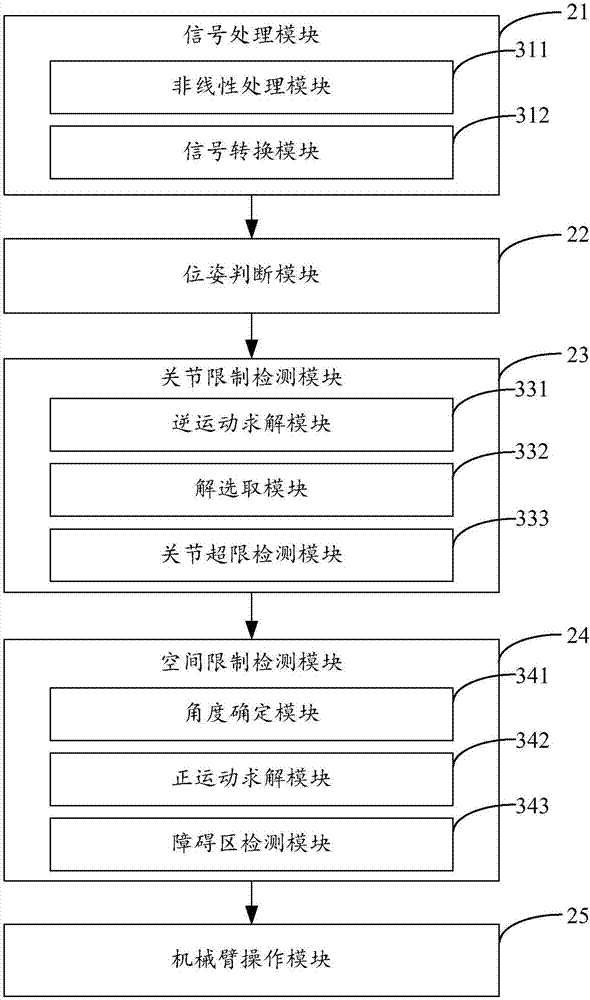
[0049] figure 2 The structure of the operating device of the robotic arm provided by the second embodiment of the present invention is shown. For the convenience of description, only the parts related to the embodiment of the present invention are shown, including:
[0050] The signal processing module 21 receives an operation instruction sent by a user through a pre-connected operation terminal, performs nonlinear processing and signal conversion on the operation instruction, and obtains a speed signal for adjusting the pose of the end of the robotic arm.
[0051] In the embodiment of the present invention, in order to avoid the misoperation caused by the unstable operation of the resting platform of the operation end, or the malfunction caused by the linkage of other operation channels caused by the operation of the operation end when operating a certain operation channel, the control of each operation channel of the operation end is Set a signal lower limit value. When th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More